I am an Associate Professor at the Intelligent Vehicles group, part of the Cognitive Robotics department of the Mechanical Engineering faculty, TU Delft, The Netherlands. You can find my staff page on the TU Delft website.
I work on multi-modal environment perception for intelligent vehicles, and mostly target crowded urban settings. My research applies deep learning and probabilistic models to automatically detect objects and predict traffic situations from multi-modal data, collected with on-vehicle sensors. Most of my research therefore relates to Computer Vision, but also addresses other sensing modalities, such as Lidar, Radar and Acoustics. To understand the environment, the autonomous vehicle needs to create useful representations of its environment, detect and identify dynamic and static obstacles, self-localize itself, and using all sensor information to anticipate future events. Applications include anticipating Vulnerable Road User (VRU) behaviour, path prediction, self-localizing the vehicle using satellite images, and fusing 3D depth and 2D image data for improved object detection.
Publications
You can find an up-to-date list on my Google Scholar profile.
Toggle screenshots
2026
-
Uncertainty-Aware Autonomous Vehicles: Predicting the Road Ahead, S. K, Manchingal, A. Amaritei, M. Gohad, M. Sultana, J. F. P. Kooij, F. Cuzzolin, A. Bradley, IEEE International Conference on Robotics and Automation (ICRA), 2026. *to appear*
More info … arXiv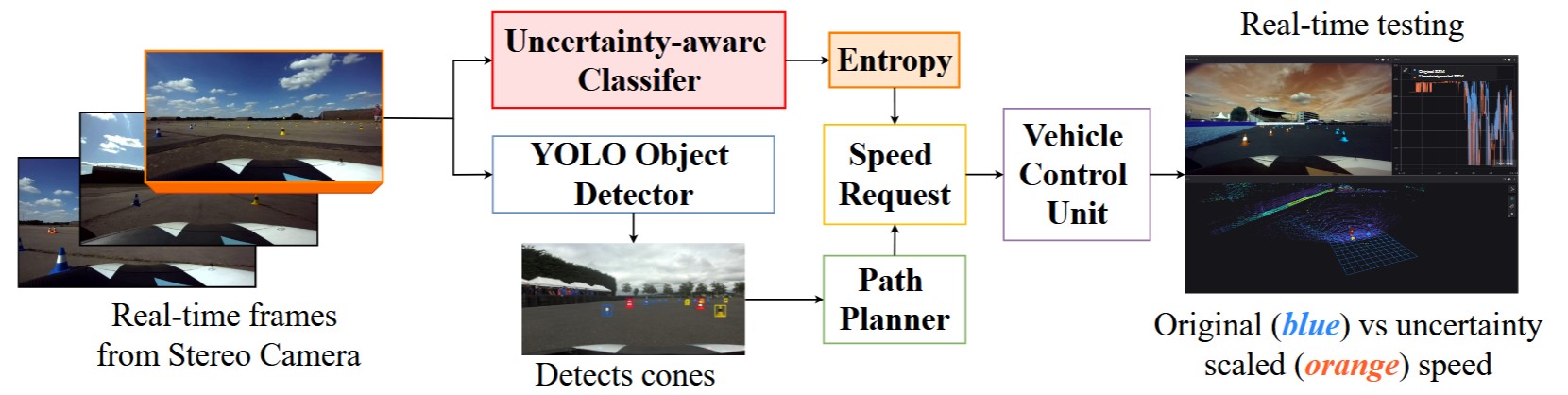
-
Off-Policy Safe Reinforcement Learning with Cost-Constrained Optimistic Exploration, G. Li, M. T. J. Spaan, J. F. P. Kooij, International Conference on Learning Representations (ICLR), 2026. *to appear*
More info … -
AsyncBEV: Cross-modal flow alignment in Asynchronous 3D Object Detection, S. Wang, H. Caesar, L. Nan, J. F. P. Kooij, International Conference on Learning Representations (ICLR), 2026. *to appear*
More info … arXiv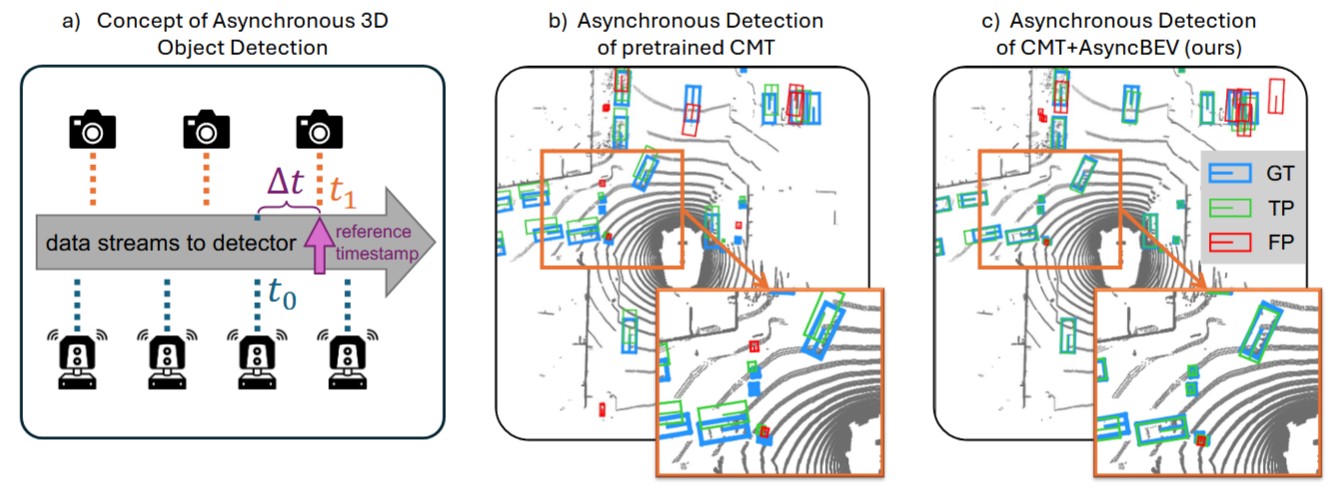
-
NeuSEditor: From Multi-View Images to Text-Guided Neural Surface Edits, N. Ibrahimli, J.F.P. Kooij, L. Nan, IEEE International Conference on 3D Vision (3DV), 2026. *to appear*
More info … arXiv Code Project page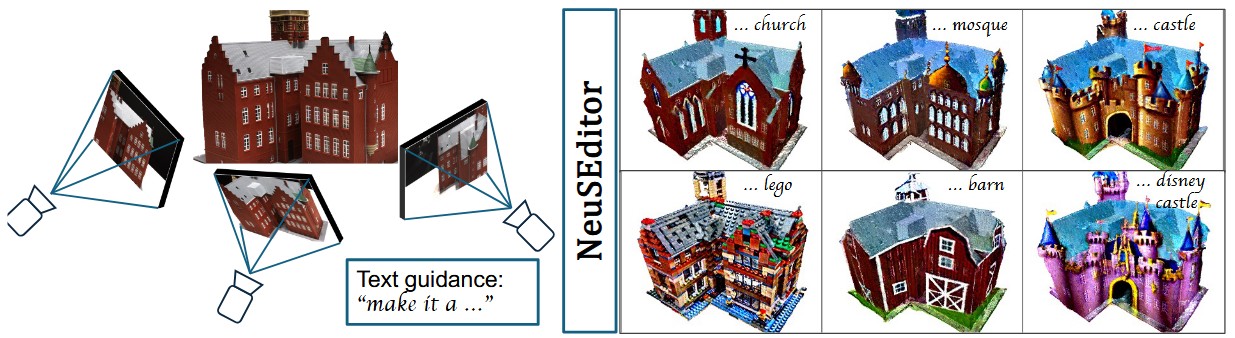
2025
-
The Overlooked Value of Test-time Reference Sets in Visual Place Recognition, M. Zaffar, L. Nan, S. Scherer, J.F.P. Kooij, Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, pp. 7234-7243, 2025.
More info … Paper arXiv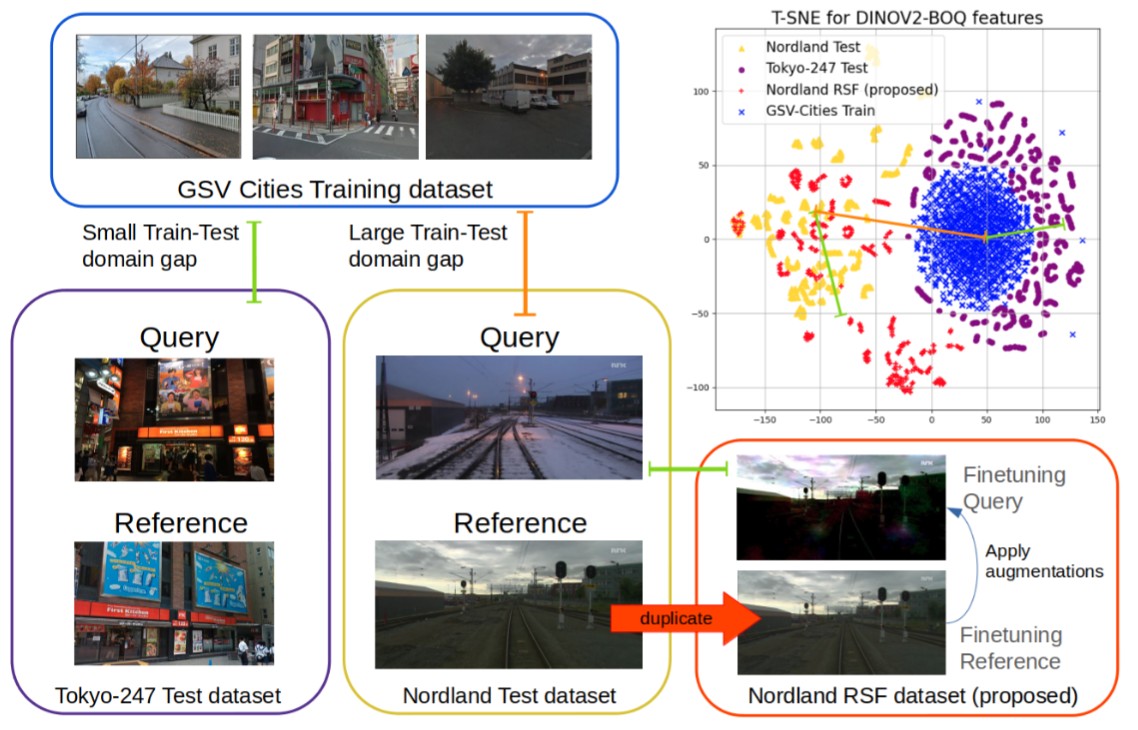
-
VoteFlow: Enforcing Local Rigidity in Self-Supervised Scene Flow, Y. Lin, S. Wang, L. Nan, J.F.P. Kooij, H. Caesar, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 17155-17164, 2025.
More info … Paper arXiv Code Video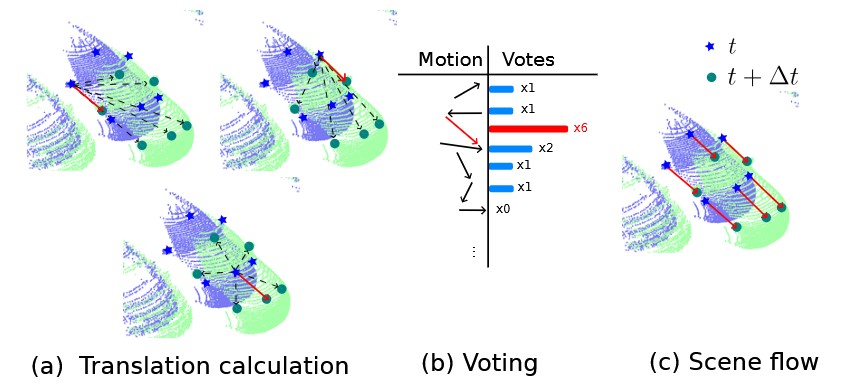
-
Road User Specific Trajectory Prediction in Mixed Traffic Using Map Data, H. Boekema, E.Y. Moustafa, J.F.P. Kooij, D.M. Gavrila, IEEE Robotics and Automation Letters (RA-L), 10(6), pp. 6159-6166, 2025. doi: 10.1109/LRA.2025.3564746
More info … Paper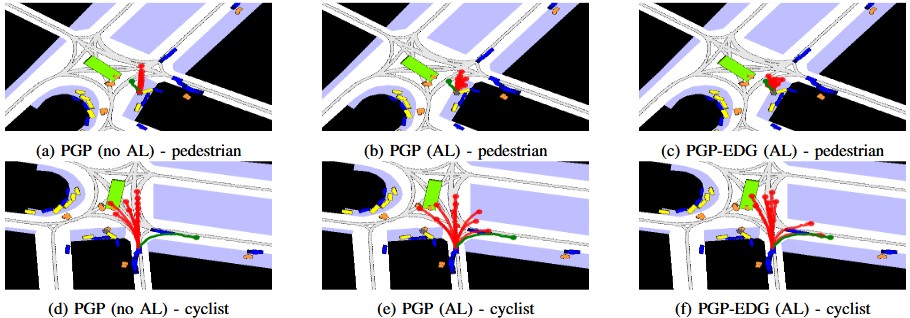
-
A Vehicle System for Navigating Among Vulnerable Road Users Including Remote Operation, O. de Groot, A. Bertipaglia, H. Boekema, V. Jain, M. Kegl, V. Kotian, T. Lentsch, Y. Lin, C. Messiou, E. Schippers, F. Tajdari, S. Wang, Z. Xia, M. Zaffar, R. Ensing, M. Garzon, J. Alonso-Mora, H. Caesar, L. Ferranti, R. Happee, J.F.P. Kooij, G. Papaioannou, B. Shyrokau, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 2482-2489, 2025. doi: 10.1109/IV64158.2025.11097542
More info … Paper arXiv
2024
-
A Deep Automotive Radar Detector using the RaDelft Dataset, I. Roldan, A. Palffy, J.F.P. Kooij, D.M. Gavrila, F. Fioranelli, A. Yaravoy, IEEE Transactions on Radar Systems, 2, pp. 1062-1075, 2024. doi: 10.1109/TRS.2024.3485578
More info … Paper arXiv Code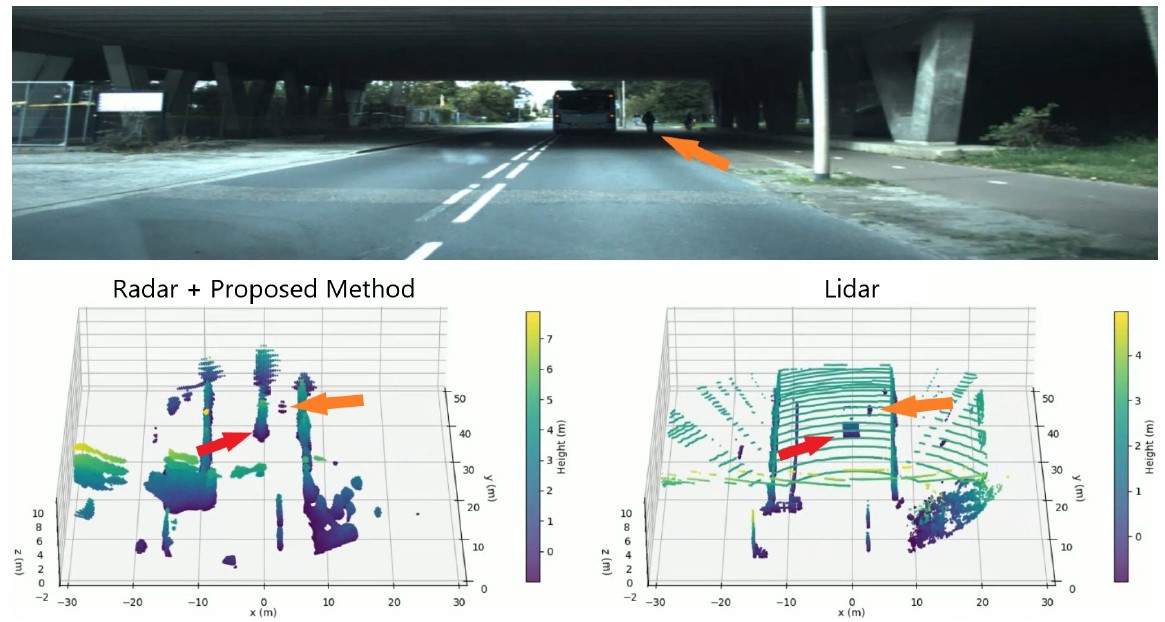
-
Adapting Fine-grained Cross-view Localization to Areas without Fine Ground Truth, Z. Xia, Y. Shi, H. Li, J.F.P. Kooij, European Conference on Computer Vision (ECCV), 2024. doi: 10.1007/978-3-031-72751-1_23
More info … Paper arXiv Code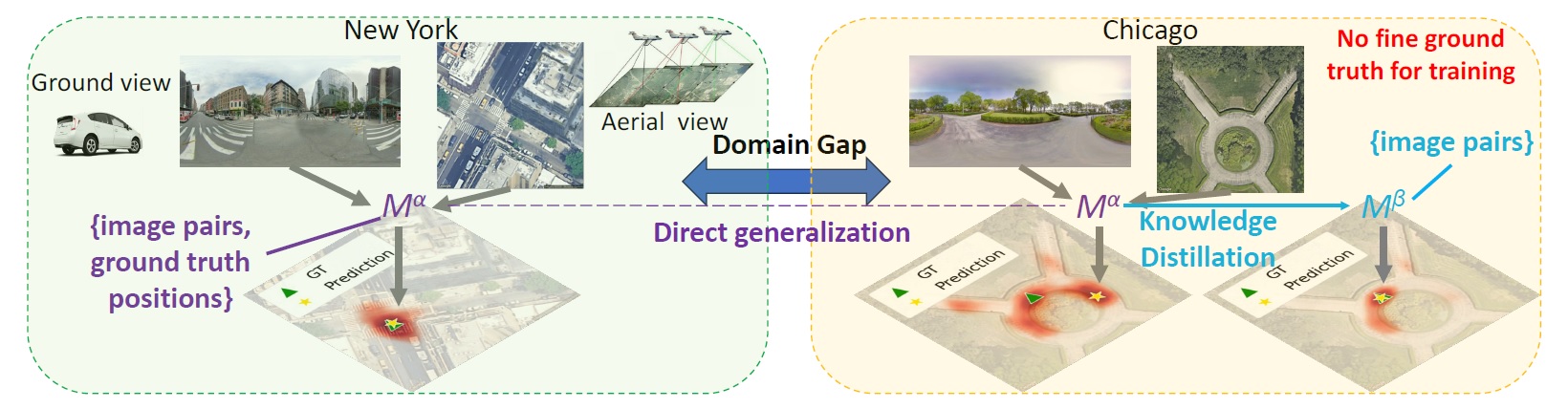
-
On the Estimation of Image-matching Uncertainty in Visual Place Recognition, M. Zaffar, L. Nan, J.F.P. Kooij, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 17743-17753, 2024. *Poster Highlight* (top 15% of accepted papers)
More info … Paper arXiv Code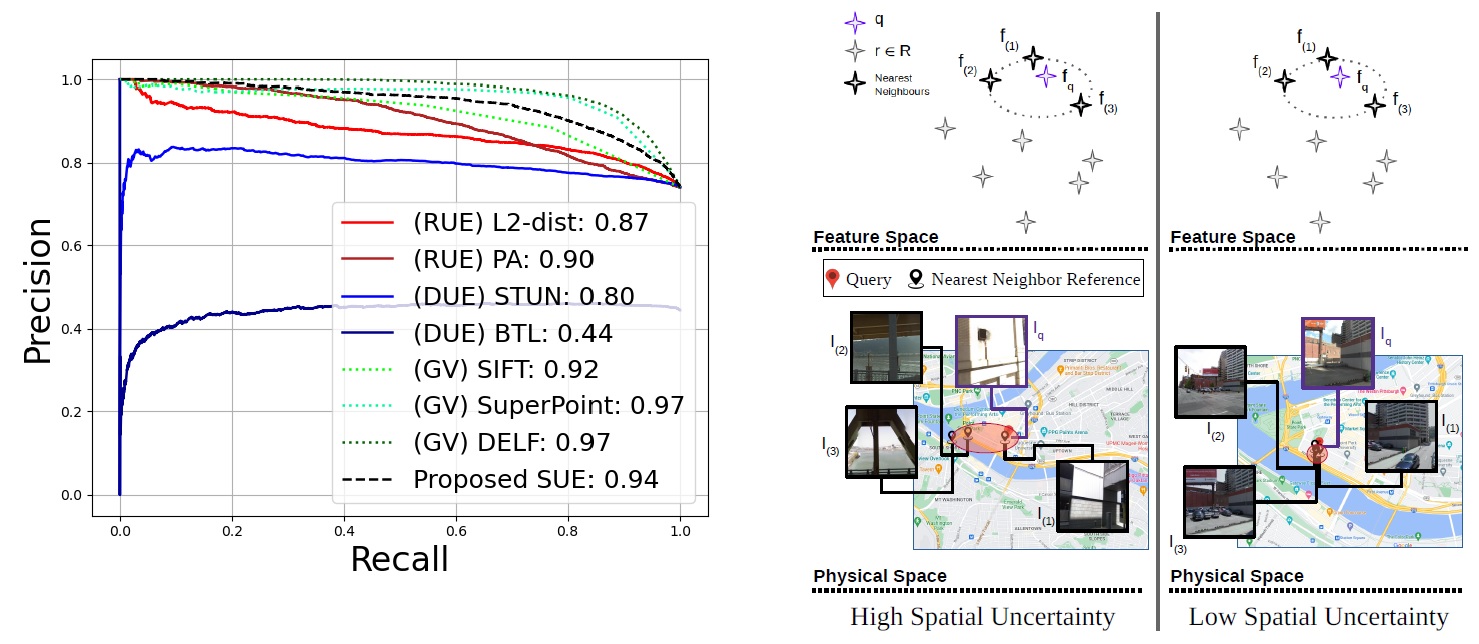
-
Convolutional Cross-View Pose Estimation, Z. Xia, O. Booij, J.F.P. Kooij, IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 46(5), pp. 3813-3831, 2024. doi: 10.1109/TPAMI.2023.3346924
More info … Paper arXiv Code Video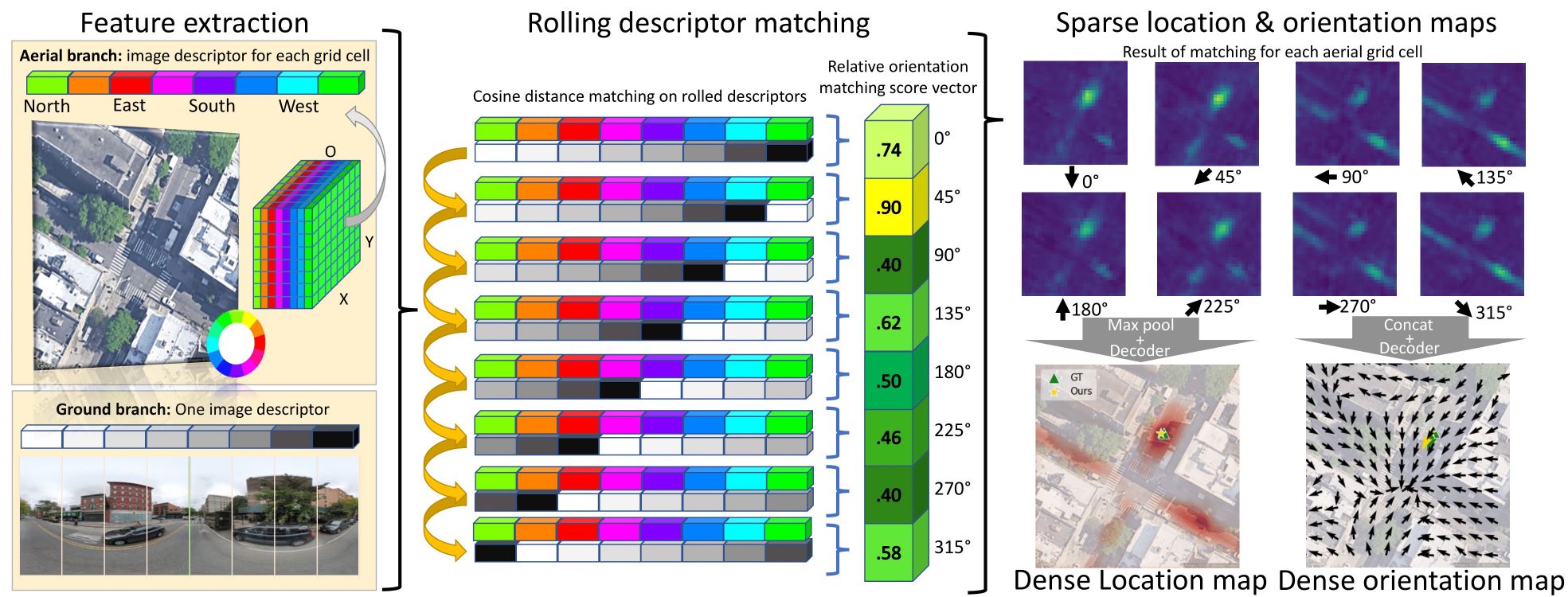
-
UniBEV: Multi-modal 3D Object Detection with Uniform BEV Encoders for Robustness against Missing Sensor Modalities, S. Wang, H. Caesar, L. Nan, J.F.P. Kooij, IEEE Intelligent Vehicles Symposium (IVS), 2024.
More info … arXiv Code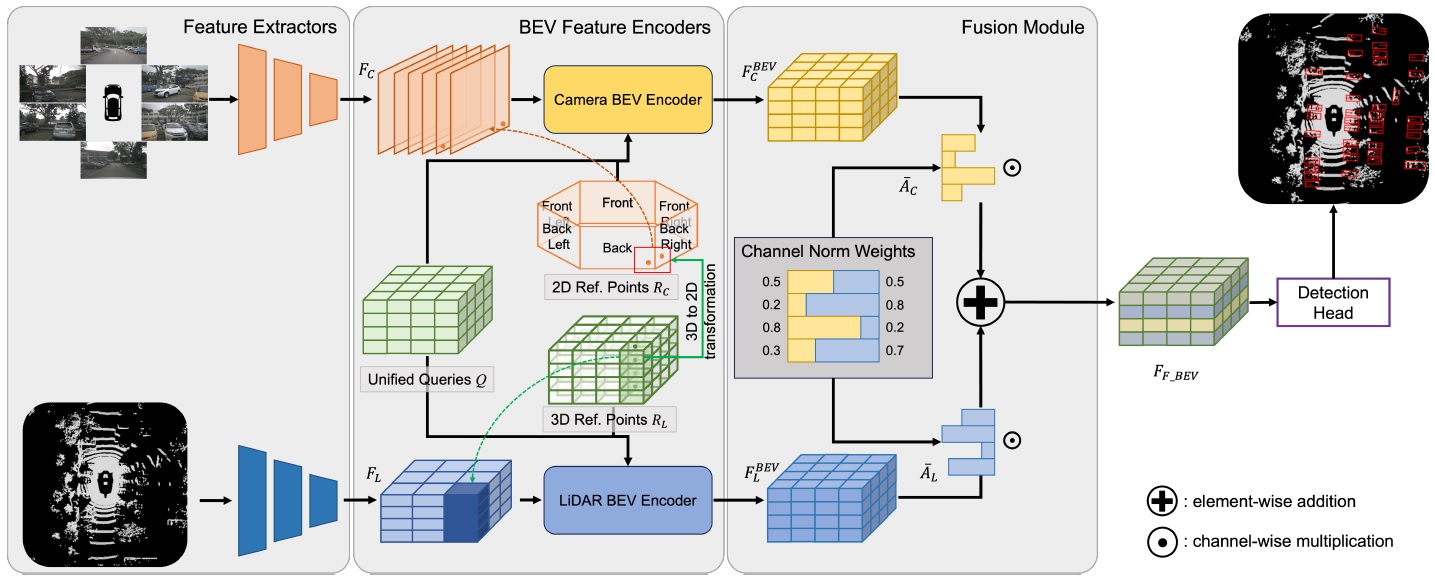
-
Multi-Class Trajectory Prediction in Urban Traffic Using the View-of-Delft Prediction Dataset, H. Boekema, B. Martens, J.F.P. Kooij, D.M. Gavrila, IEEE Robotics and Automation Letters (RA-L), 9(5), pp. 4806-4813, 2024. doi: 10.1109/LRA.2024.3385693
More info … Paper Project page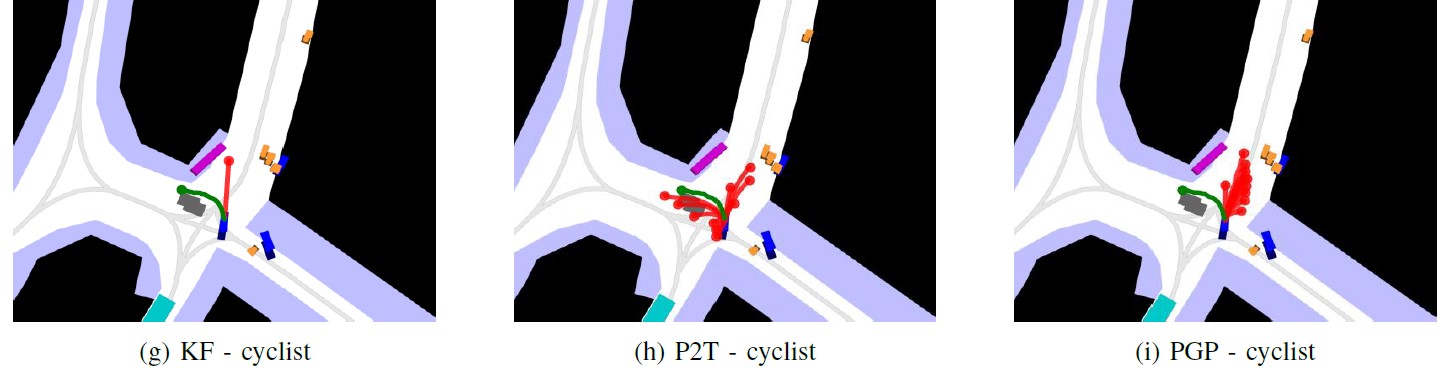
-
Adaptive Cruise Control Utilizing Noisy Multi-leader Measurements: A Learning-based Approach, Y. Ni, V.L. Knoop, J.F.P. Kooij, B. van Arem, IEEE Open Journal of Intelligent Transportation Systems, 5, pp. 251-264, 2024. doi: 10.1109/OJITS.2024.3395149
More info … Paper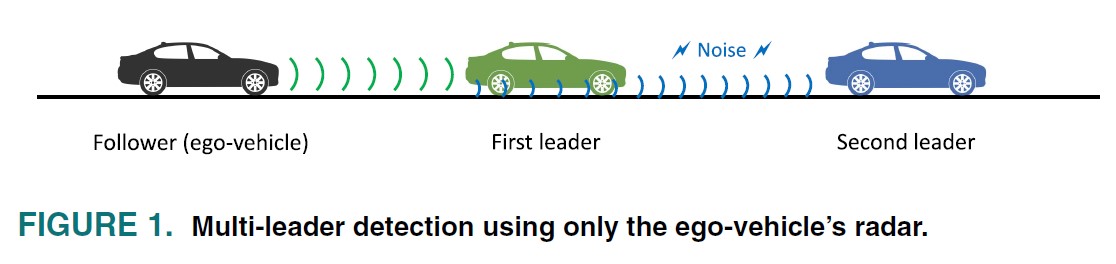
-
See further than CFAR: A data-driven radar detector trained by Lidar, I. Roldan, A. Palffy, J.F.P. Kooij, D.M. Gavrila, F. Fioranelli, A. Yaravoy, IEEE Radar Conference, 2024. *received Best Student Paper award*
More info … arXiv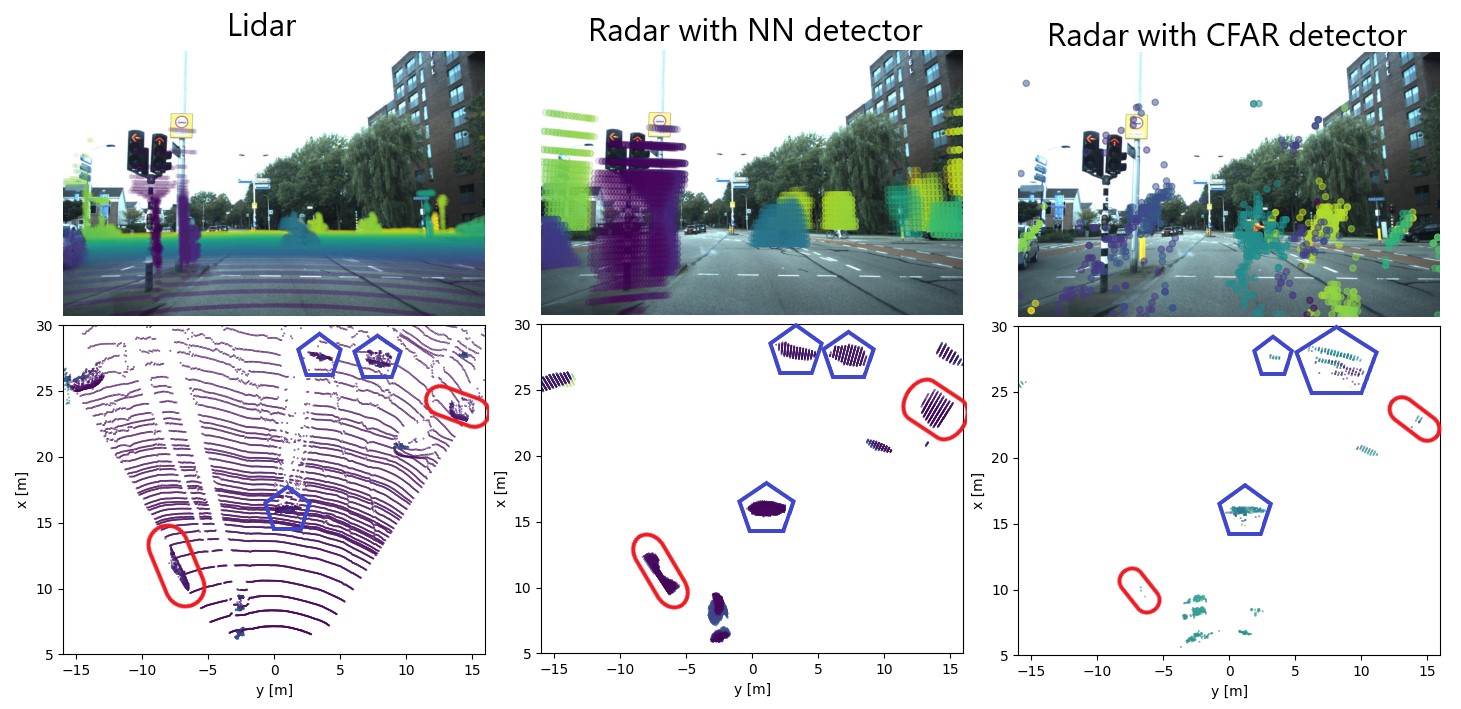
-
MuVieCAST: Multi-View Consistent Artistic Style Transfer, N. Ibrahimli, J.F.P. Kooij, L. Nan, IEEE International Conference on 3D Vision (3DV), pp. 1136-1145, 2024. doi: 10.1109/3DV62453.2024.00090
More info … Paper arXiv Code Project page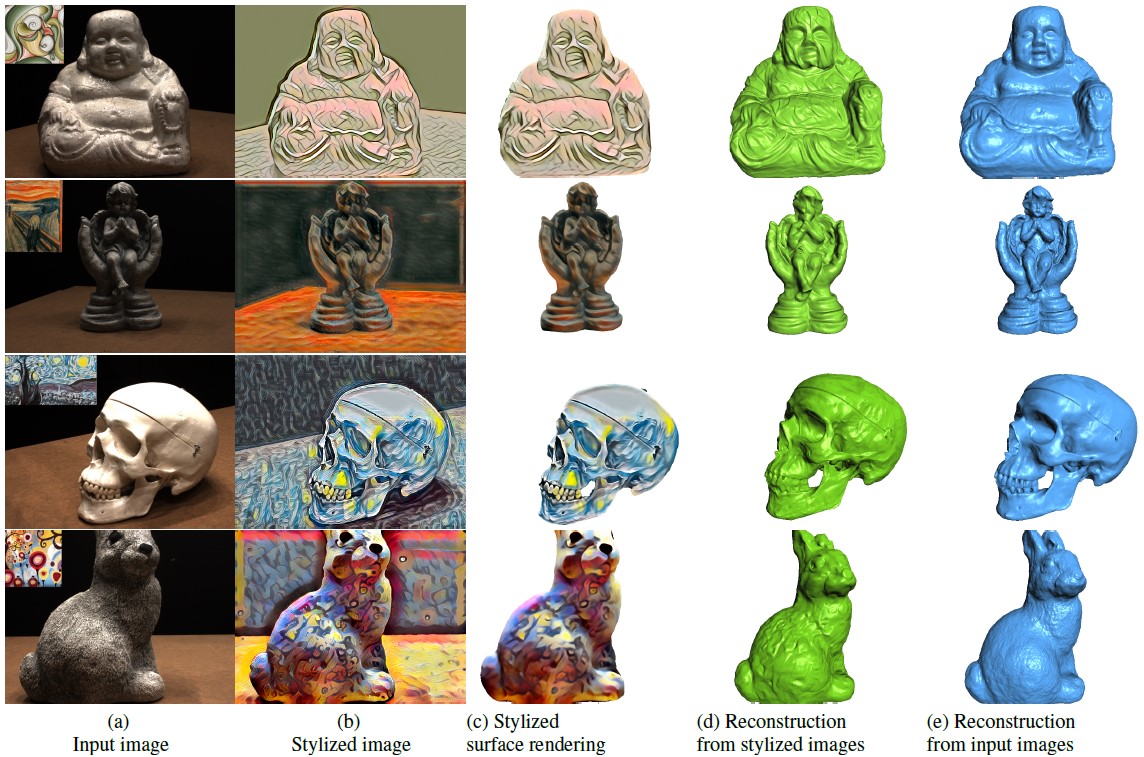
2023
-
DDL-MVS: Depth Discontinuity Learning for Multi-View Stereo Networks, N. Ibrahimli, H. Ledoux, J.F.P. Kooij, L. Nan, Remote Sensing, 15, pp. 2970, 2023. doi: 10.3390/rs15122970
More info … Paper arXiv Code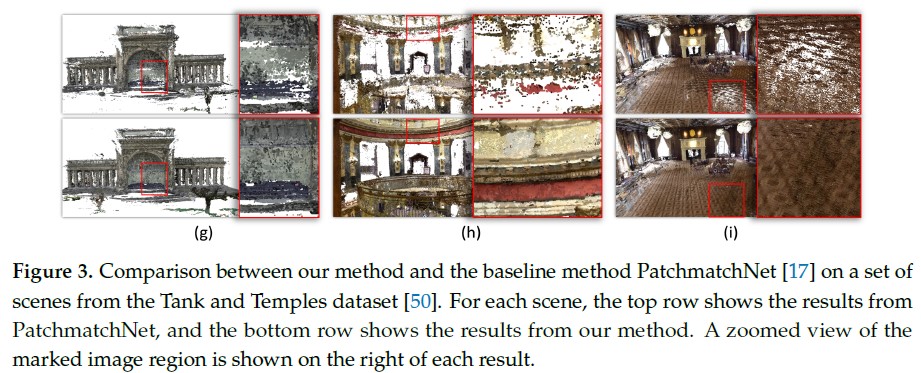
-
SliceMatch: Geometry-guided Aggregation for Cross-View Pose Estimation, T. Lentsch, Z. Xia, H. Caesar, J.F.P. Kooij, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 17225-17234, 2023.
More info … Paper arXiv Code Video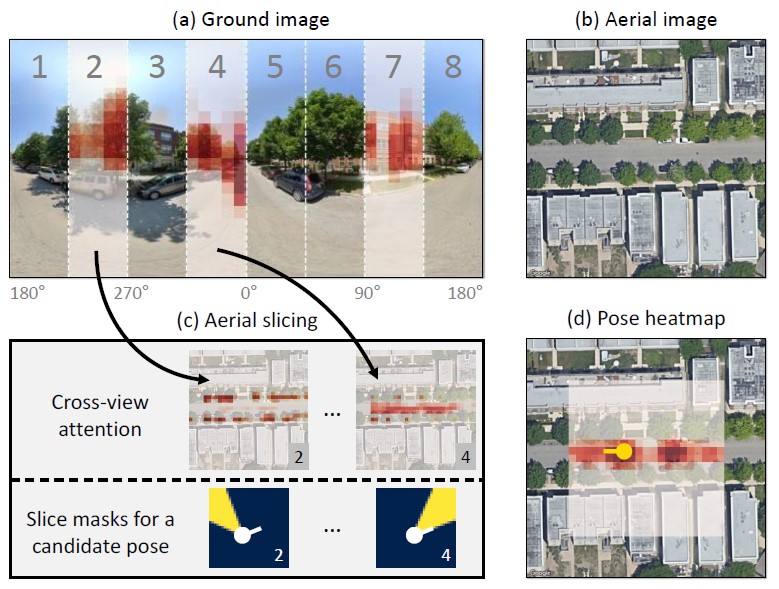
-
CoPR: Toward Accurate Visual Localization With Continuous Place-descriptor Regression, M. Zaffar, L. Nan, J.F.P. Kooij, IEEE Transactions on Robotics (T-RO), 39(4), pp. 2825-2841, 2023. doi: 10.1109/TRO.2023.3262106
More info … Paper arXiv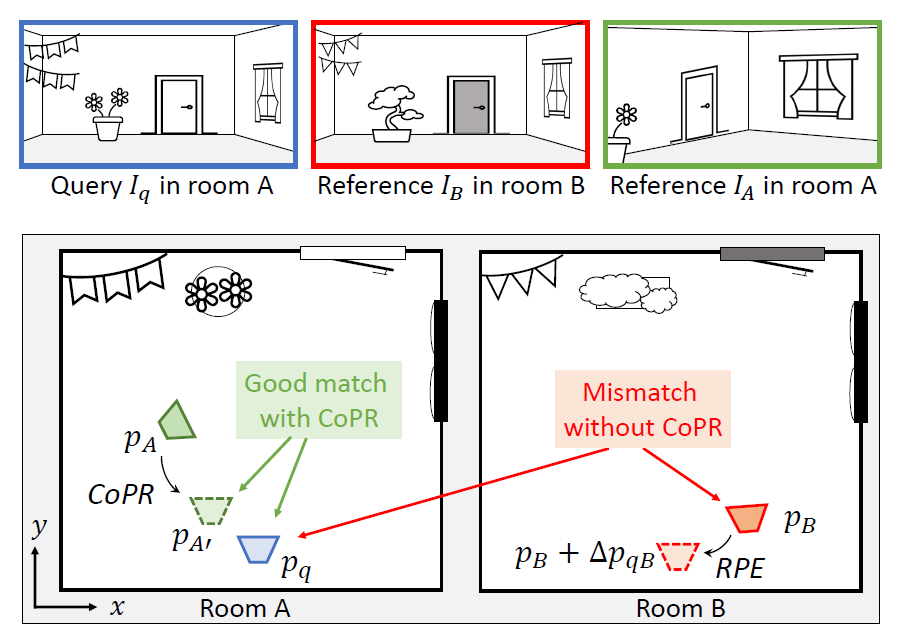
-
How Informative is the Approximation Error from Tensor Decomposition for Neural Network Compression?, J. Schuurmans, K. Batselier, J.F.P. Kooij, International Conference on Learning Representations (ICLR), 2023. doi: 10.48550/arXiv.2305.05318
More info … Paper arXiv Code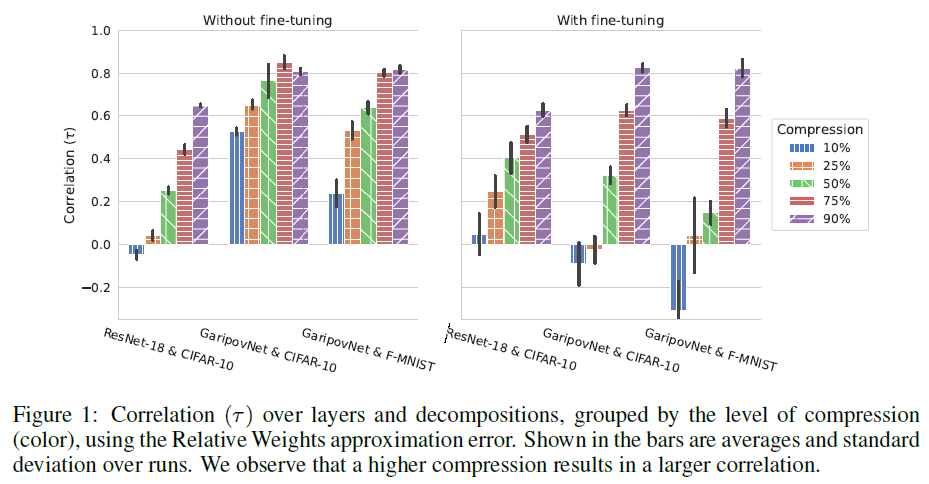
-
Detecting darting out pedestrians with occlusion aware sensor fusion of radar and stereo camera, A. Palffy, J.F.P. Kooij, D.M. Gavrila, IEEE Transactions on Intelligent Vehicles (T-IV), 8(2), pp. 1459-1472, 2023. doi: 10.1109/TIV.2022.3220435
More info … Paper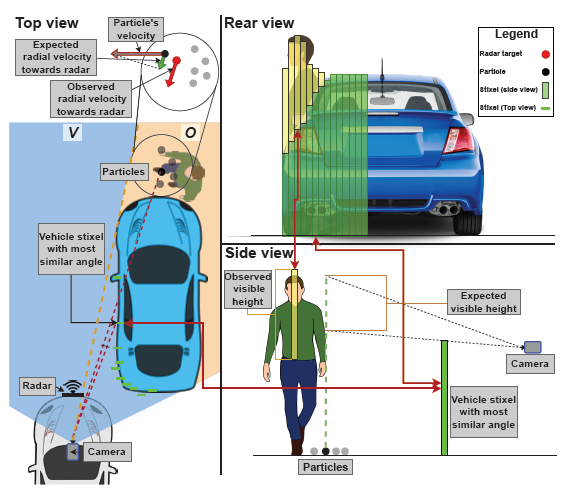
2022
-
Push-the-Boundary: Boundary-aware Feature Propagation for Semantic Segmentation of 3D Point Clouds, S. Du, N. Ibrahimli, J. Stoter, J. Kooij, L. Nan, IEEE International Conference on 3D Vision (3DV), 2022.
More info … arXiv Code Video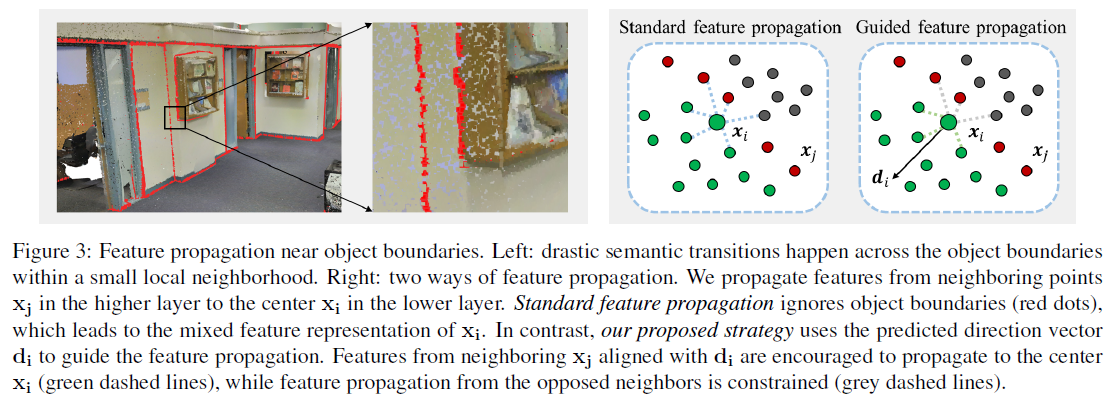
-
Visual Cross-View Metric Localization with Dense Uncertainty Estimates, Z. Xia, O. Booij, M. Manfredi, J.F.P. Kooij, European Conference on Computer Vision (ECCV), pp. 90-106, 2022. doi: 10.1007/978-3-031-19842-7_6
More info … Paper arXiv Code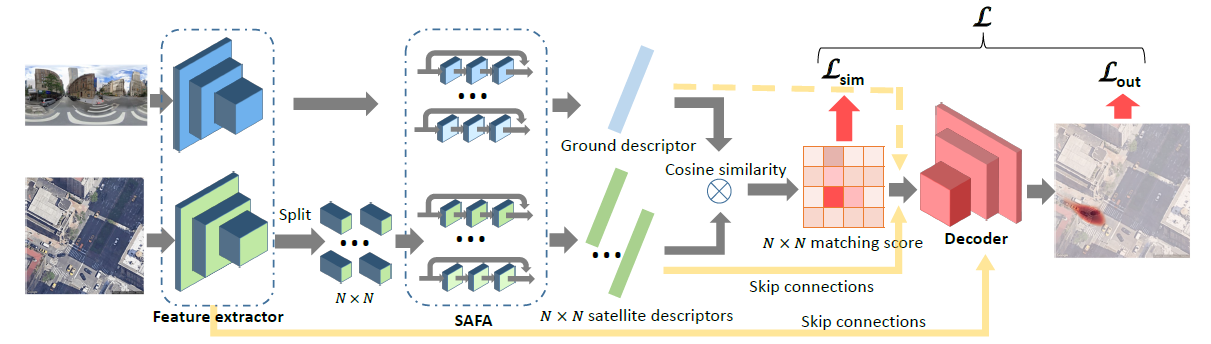
-
Multi-class Road User Detection with 3+1D Radar in the View-of-Delft Dataset, A. Palffy, E.A.I. Pool, S. Baratam, J.F.P. Kooij, D.M. Gavrila, IEEE Robotics and Automation Letters (RA-L), 7(2), pp. 4961-4968, 2022. doi: 10.1109/LRA.2022.3147324 presented at IEEE ICRA 2022
More info … Paper Video Project page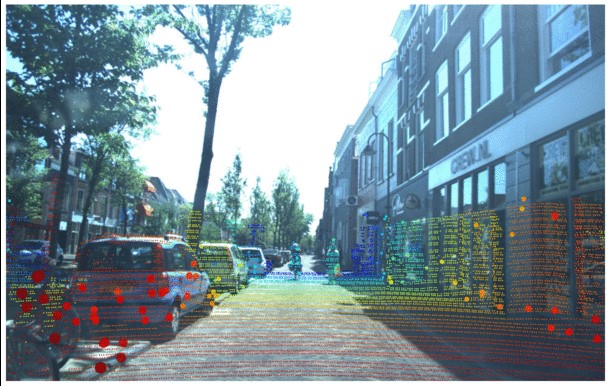
-
BackboneAnalysis: Structured Insights into Compute Platforms from CNN Inference Latency, F.M. Hafner, M. Zeller, M. Schutera, J. Abhau, J.F.P. Kooij, IEEE Intelligent Vehicles Symposium (IVS), pp. 1801-1809, 2022. doi: 10.1109/IV51971.2022.9827260
More info … Paper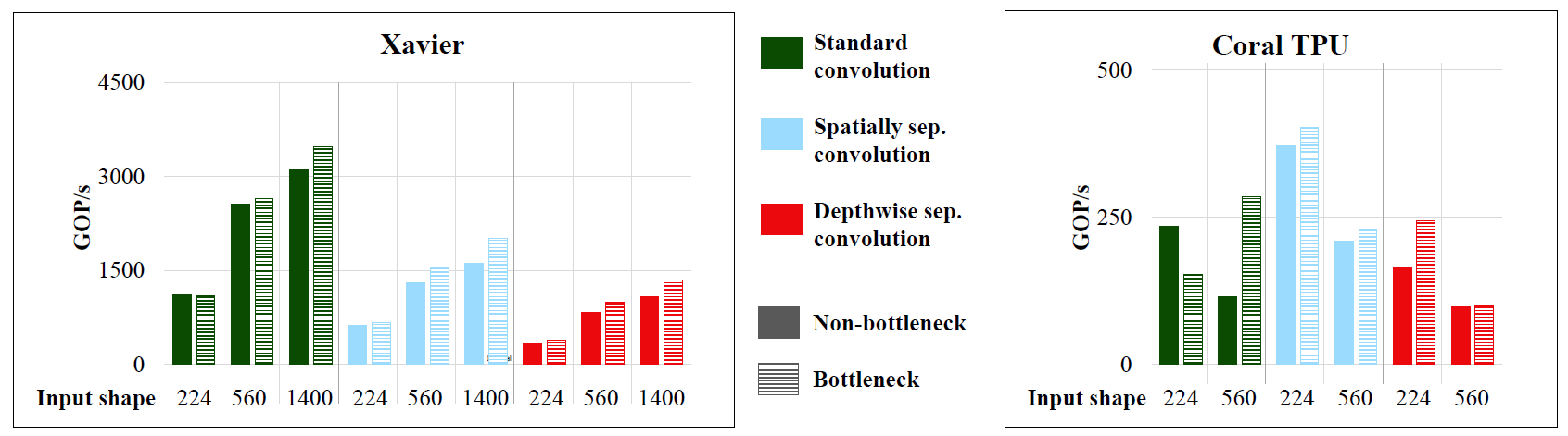
-
Cross-modal distillation for RGB-depth person re-identification, F. M. Hafner, A. Bhuyian, J.F.P. Kooij, E. Granger, Computer Vision and Image Understanding (CVIU), 216, pp. 103352, 2022. doi: 10.1016/j.cviu.2021.103352
More info … Paper arXiv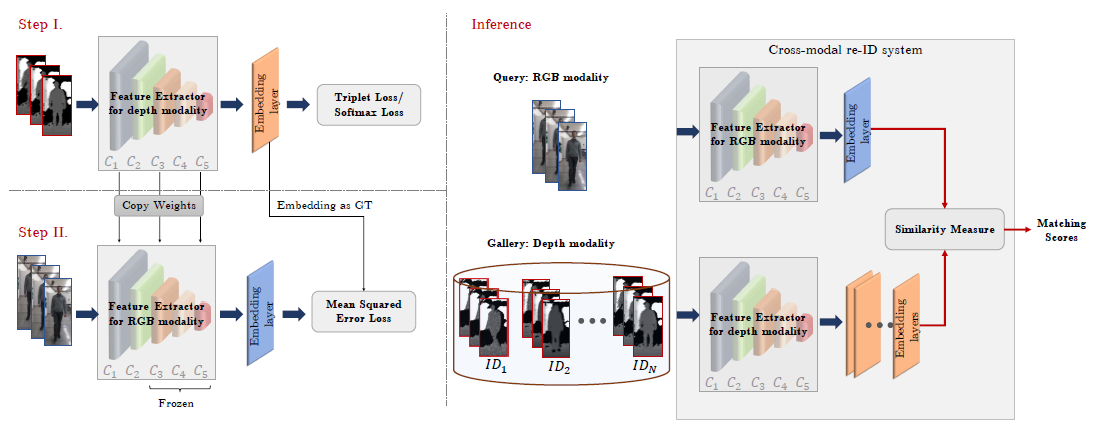
2021
-
Occupancy Grid Mapping with Cognitive Plausibility for Autonomous Driving Applications, A. Plebe, J.F.P. Kooij, G.P.R. Papini, M. Da Lio, Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, pp. 2934-2941, 2021.
More info … Paper
-
Cross-View Matching for Vehicle Localization by Learning Geographically Local Representations, Z. Xia, O. Booij, M. Manfredi, J.F.P. Kooij, IEEE Robotics and Automation Letters (RA-L), 6(3), pp. 5921-5928, 2021. doi: 10.1109/LRA.2021.3088076
More info … Paper Code Video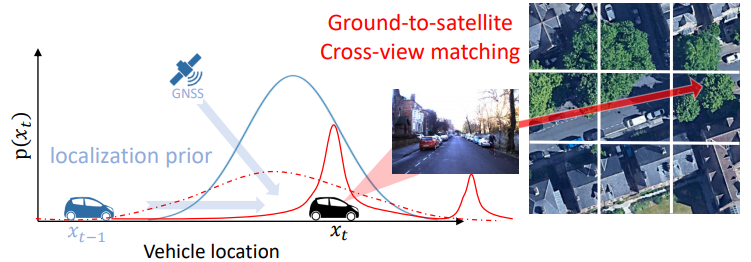
-
VPR-Bench: An Open-Source Visual Place Recognition Evaluation Framework with Quantifiable Viewpoint and Appearance Change, M. Zaffar, S. Garg, M. Milford, J. Kooij, D. Flynn, K. McDonald-Maier, S. Ehsan, International Journal of Computer Vision (IJCV), 2021. doi: 10.1007/s11263-021-01469-5
More info … Paper arXiv Code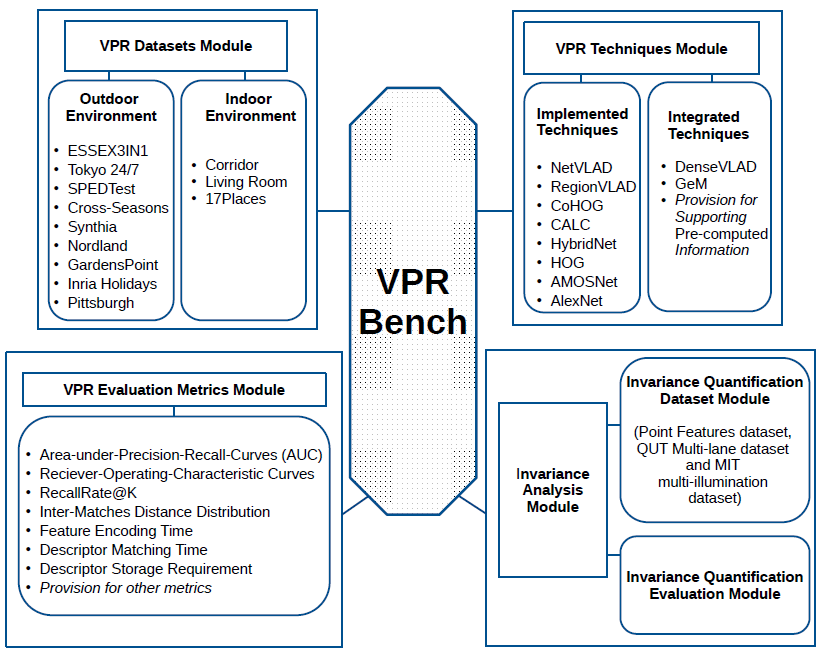
-
Fast and Compact Image Segmentation using Instance Stixels, T.H. Hehn, J.F.P. Kooij, D.M. Gavrila, IEEE Transactions on Intelligent Vehicles (T-IV), 7(1), pp. 45-46, 2021. doi: 10.1109/TIV.2021.3067223
More info … Paper Code Video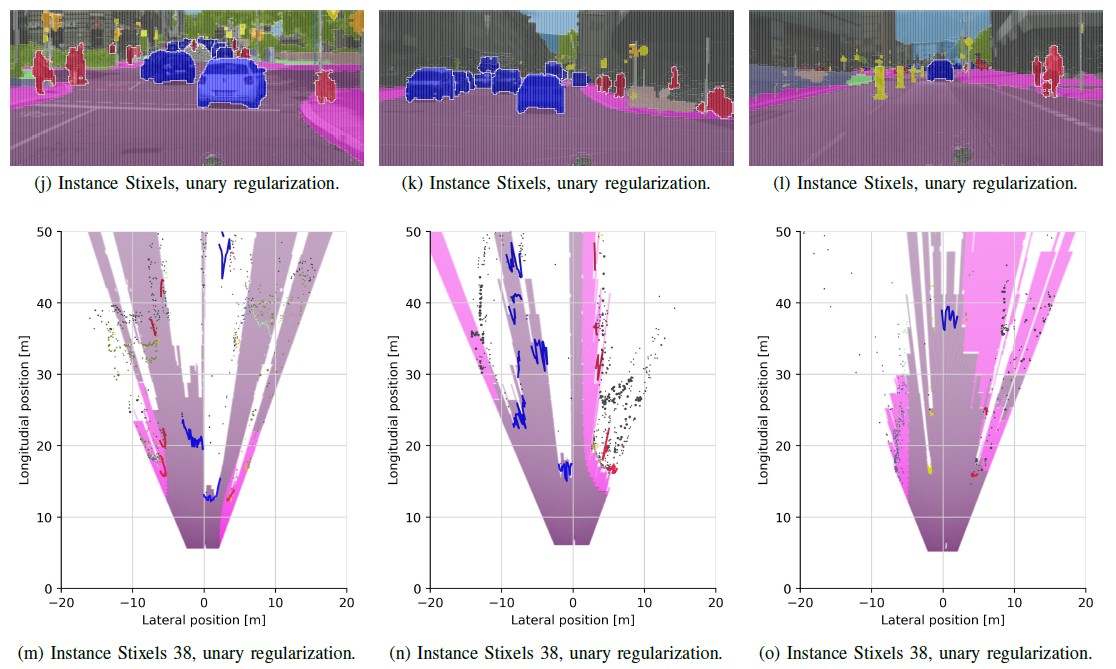
-
Crafted vs. Learned Representations in Predictive Models - A Case Study on Cyclist Path Prediction, E.A.I. Pool, J.F.P.Kooij, D.M. Gavrila, IEEE Transactions on Intelligent Vehicles (T-IV), 6(4), pp. 747-759, 2021. doi: 10.1109/TIV.2021.3064253
More info … Paper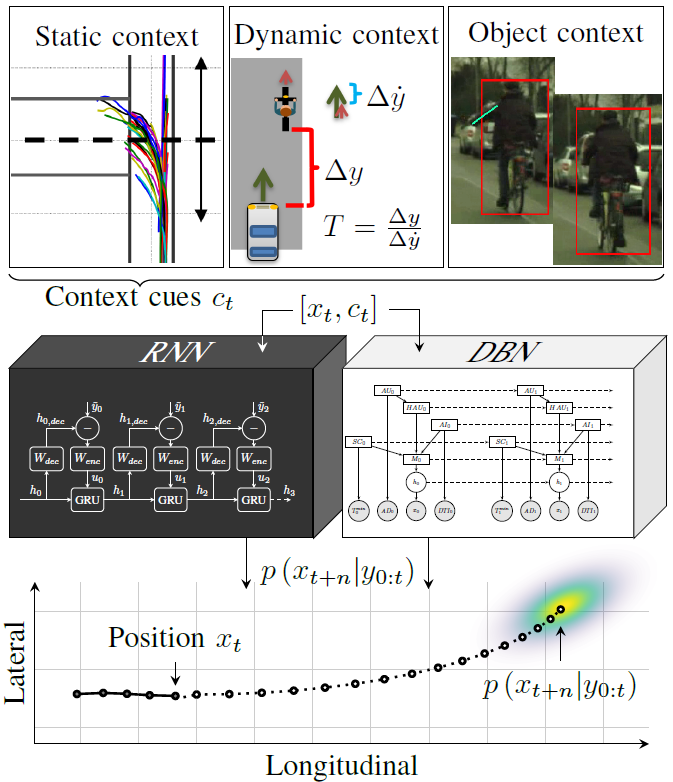
-
Hearing What You Cannot See: Acoustic Vehicle Detection Around Corners, Y. Schulz, A.K. Mattar, T.M. Hehn, J.F.P. Kooij, IEEE Robotics and Automation Letters (RA-L), 6(2), pp. 2587-2594, 2021. doi: 10.1109/LRA.2021.3062254 presented at IEEE ICRA 2021
More info … Paper arXiv Code Video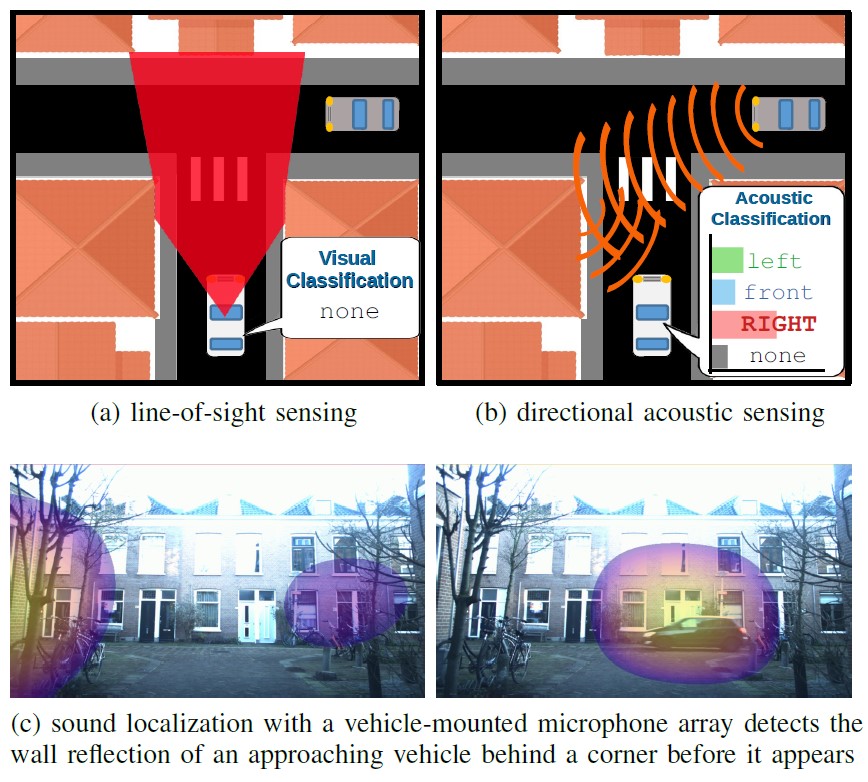
-
A Joint Extrinsic Calibration Tool for Radar, Camera and Lidar, J. Domhof, J. Kooij, D. Gavrila, IEEE Transactions on Intelligent Vehicles (T-IV), 6(3), pp. 571-582, 2021. doi: 10.1109/TIV.2021.3065208
More info … Paper Code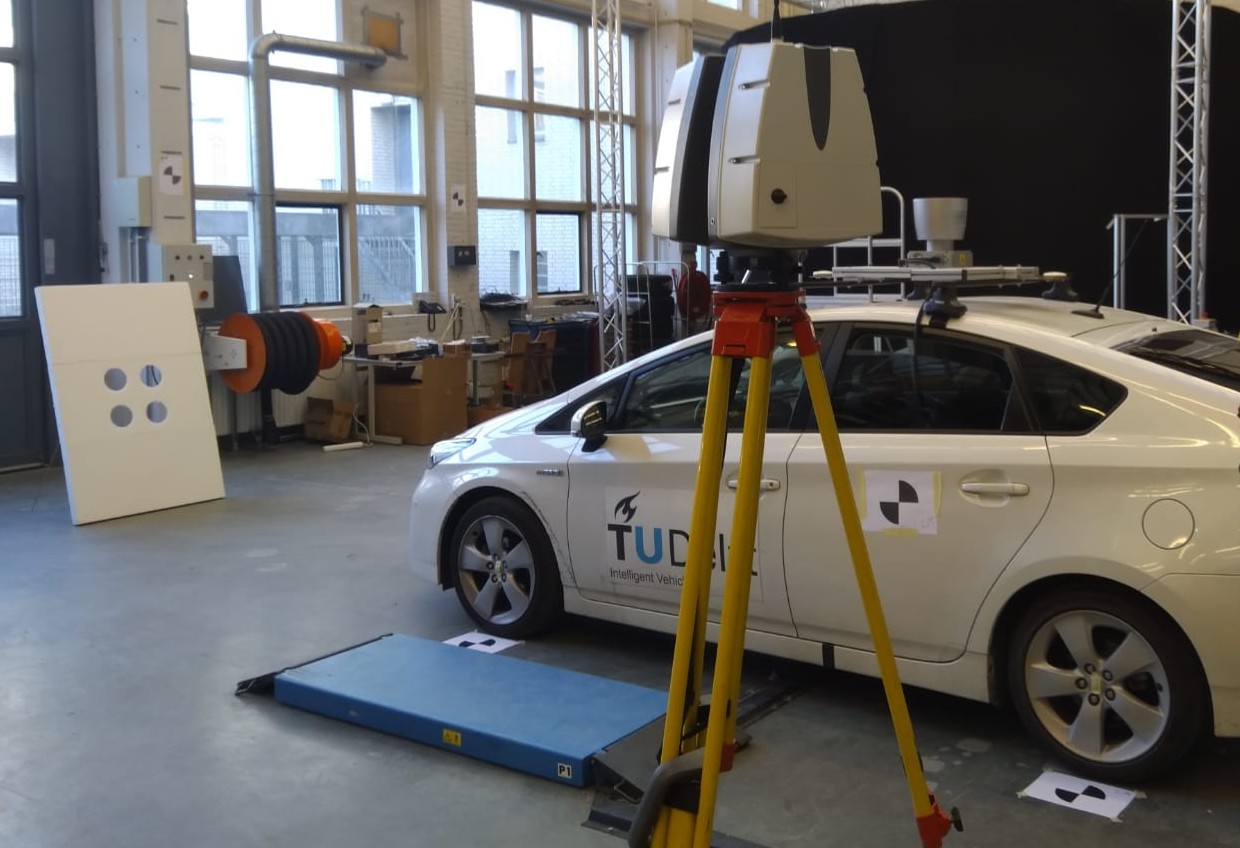
2020
-
Geographically Local Representation Learning with a Spatial Prior for Visual Localization, Z. Xia, O. Booij, M. Manfredi, J.F.P. Kooij, ECCV 2020 Workshops, 2020. doi: 10.1007/978-3-030-66096-3_38
More info … Paper Code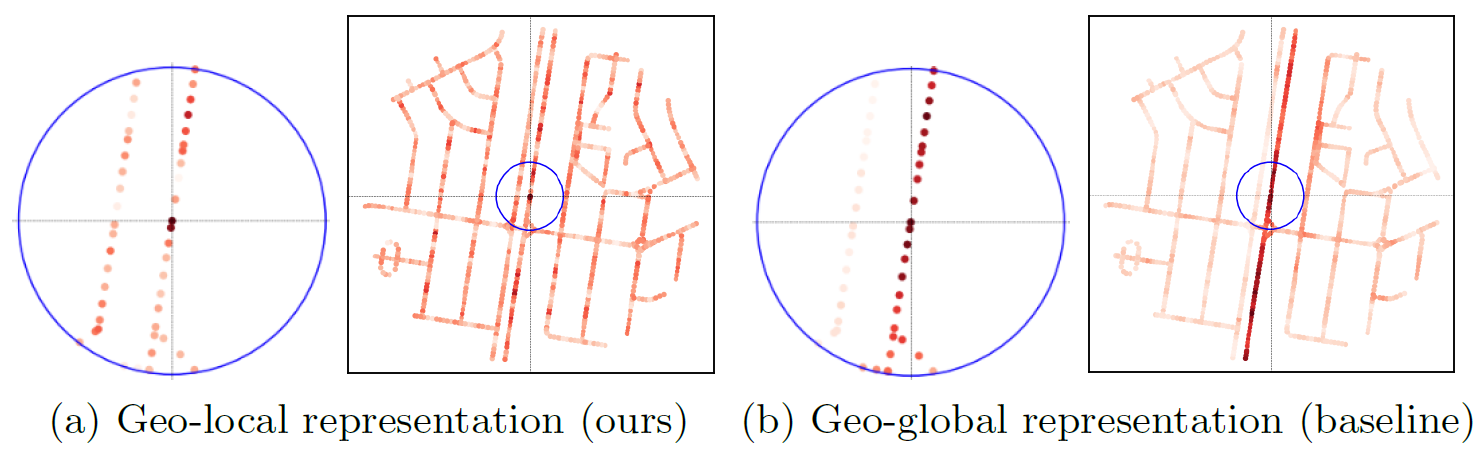
-
CNN based Road User Detection using the 3D Radar Cube, A. Palffy, J. Dong, J.F.P. Kooij, D.M. Gavrila, IEEE Robotics and Automation Letters (RA-L), 5(2), pp. 1263-1270, 2020. doi: 10.1109/LRA.2020.2967272 presented at IEEE ICRA 2020
More info … Paper arXiv Video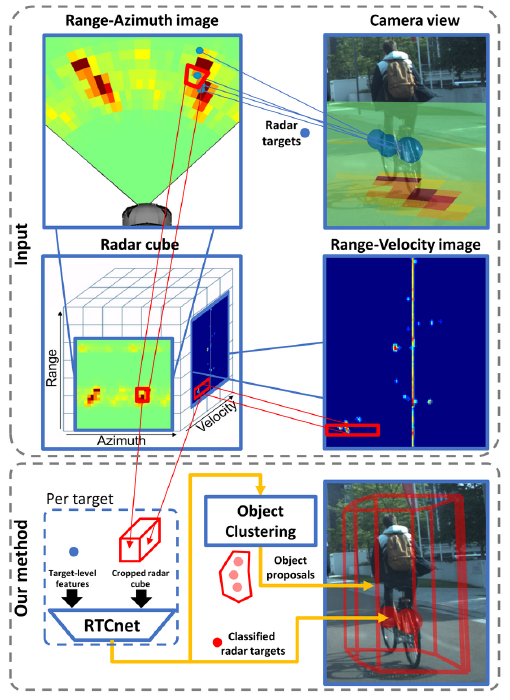
-
End-to-End Learning of Decision Trees and Forests, T.M. Hehn, J.F.P. Kooij, F.A. Hamprecht, International Journal of Computer Vision (IJCV), 128, pp. 997-1011, 2020. doi: 10.1007/s11263-019-01237-6
More info … Paper Code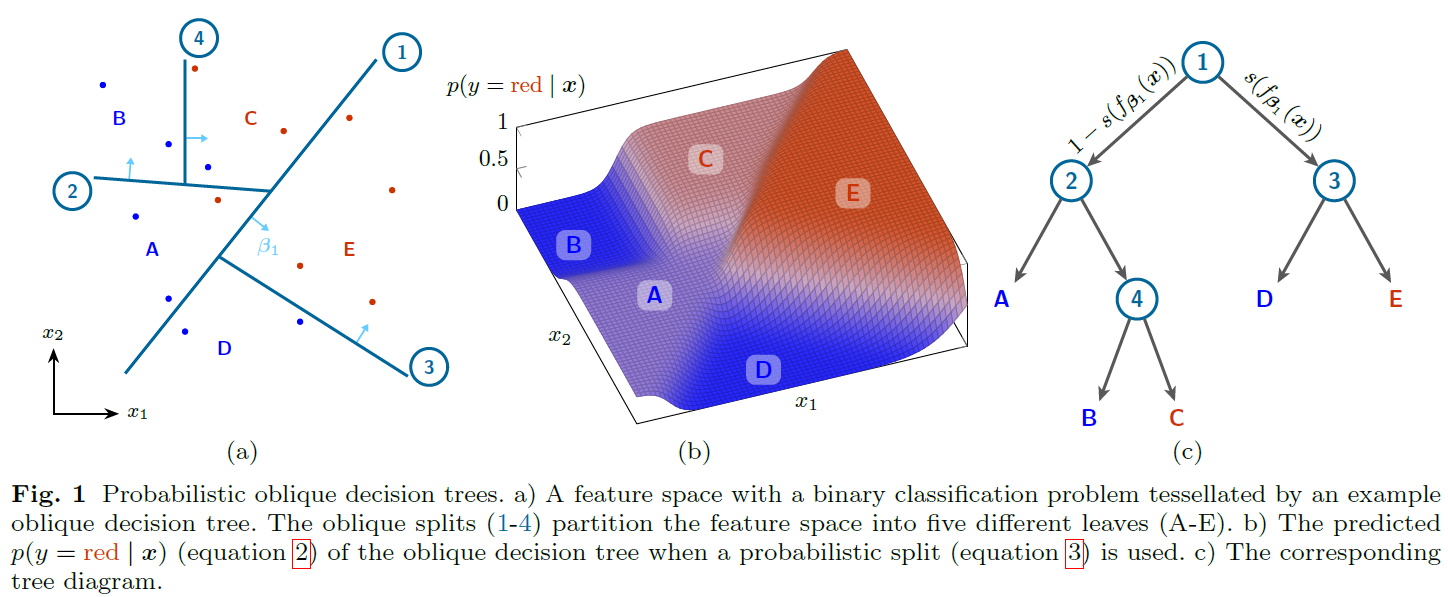
2019
-
RGB-Depth Cross-Modal Person Re-identification, F.M. Hafner, A. Bhuiyan, J.F.P. Kooij, E. Granger, IEEE International Conference on Advanced Video and Signal-based Surveillance (AVSS), pp. 1-8, 2019. doi: 10.1109/AVSS.2019.8909838 oral
More info … Paper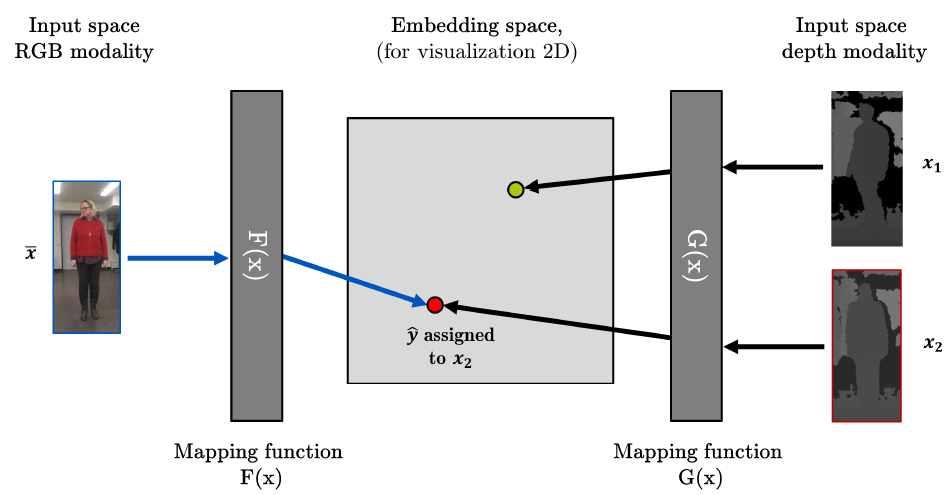
-
Context-Based Cyclist Path Prediction Using Recurrent Neural Networks, E.A.I. Pool, J.F.P. Kooij, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 824-830, 2019. doi: 10.1109/IVS.2019.8813889 oral
More info … Paper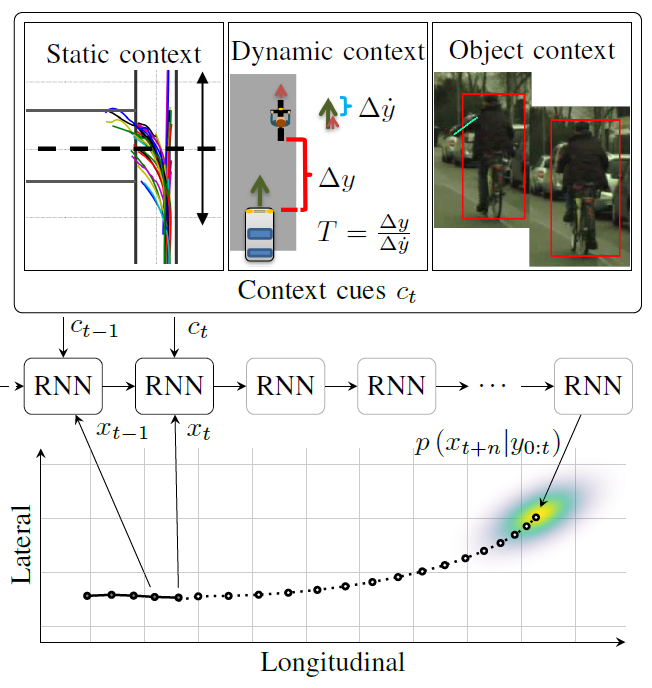
-
SafeVRU: A Research Platform for the Interaction of Self-Driving Vehicles with Vulnerable Road Users, L. Ferranti, B. Brito, E.A.I. Pool, Y. Zhang, R.M. Ensing, R. Happee, B. Shyrokau, J.F.P. Kooij, J. Alonso-Mora, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 1660-1666, 2019. doi: 10.1109/IVS.2019.8813899
More info … Paper Video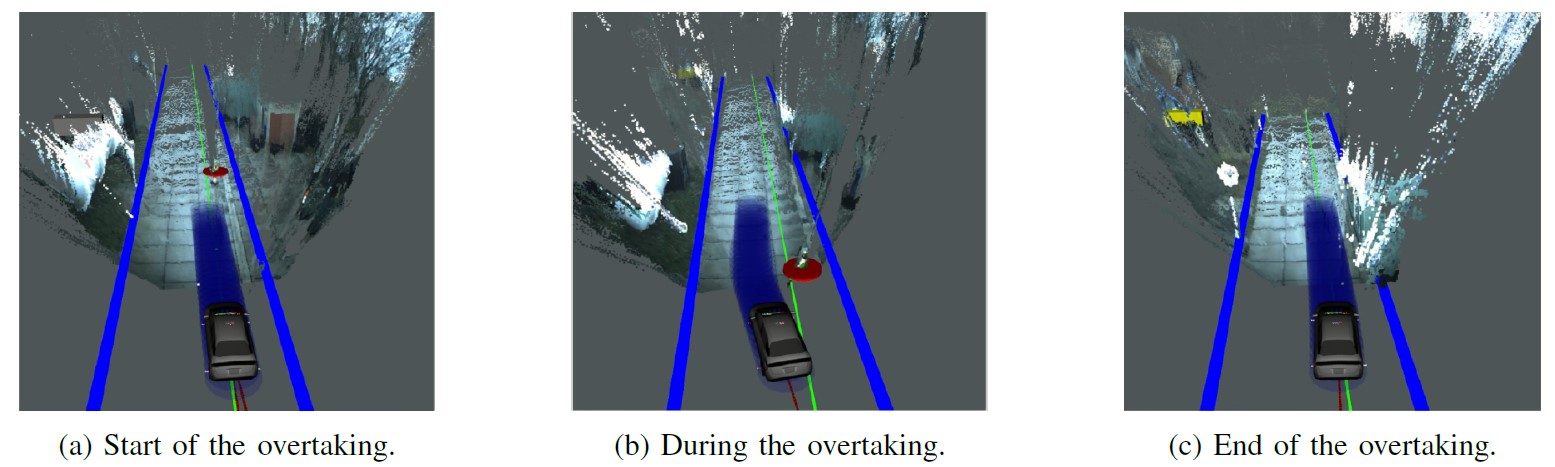
-
Instance Stixels: Segmenting and Grouping Stixels into Objects, T.H. Hehn, J.F.P. Kooij, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 2542-2549, 2019. doi: 10.1109/IVS.2019.8814243
More info … Paper Code Video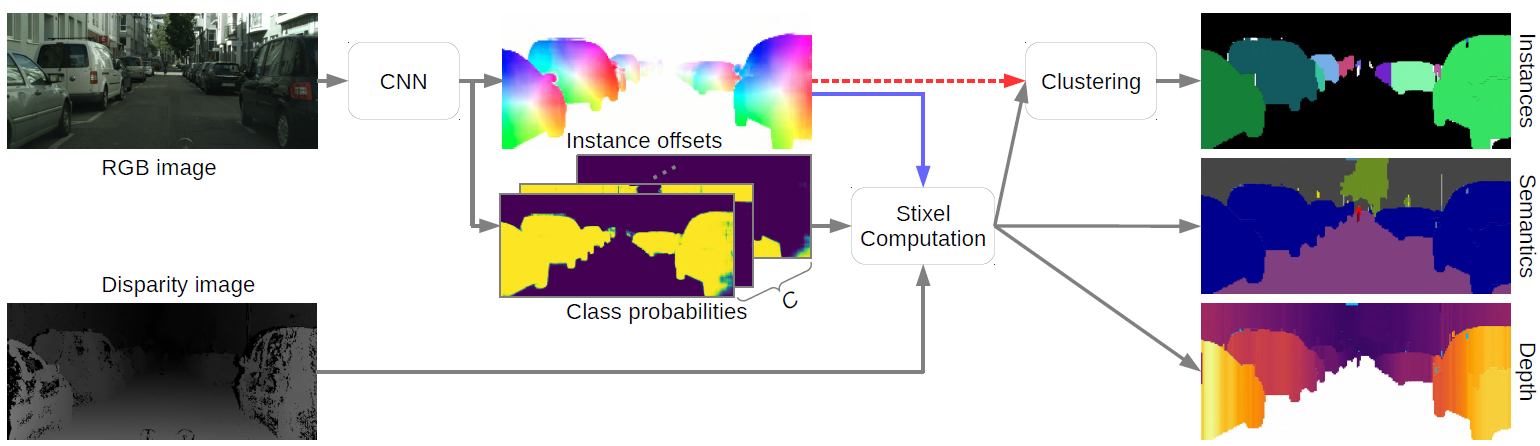
-
Occlusion Aware Sensor Fusion for Early Crossing Pedestrian Detection, A. Palffy, J.F.P. Kooij, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 1768-1774, 2019. doi: 10.1109/IVS.2019.8814065
More info … Paper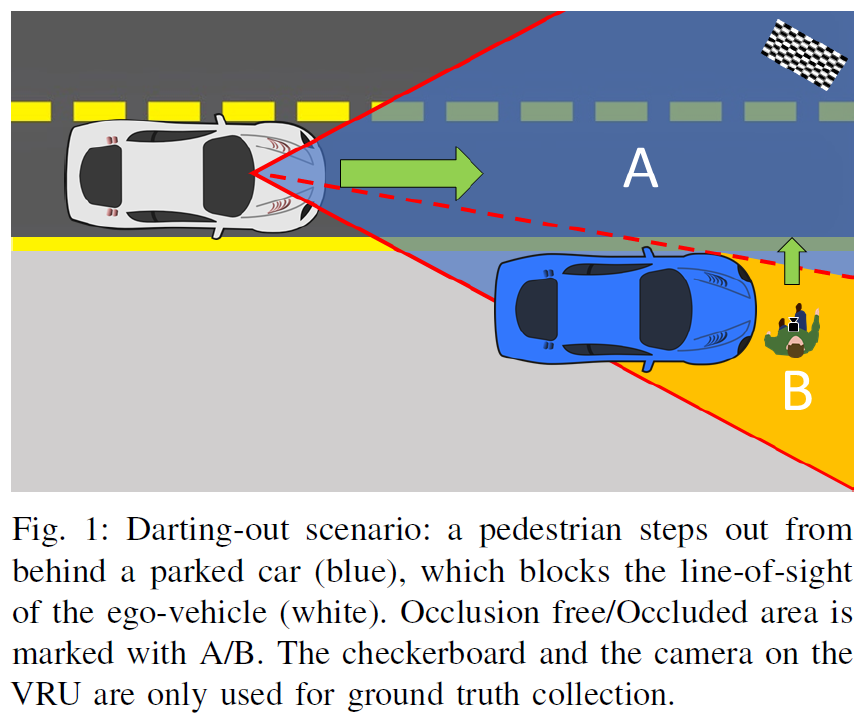
-
An Extrinsic Calibration Tool for Lidar, Camera and Radar, J. Domhof, J.F.P. Kooij, D.M. Gavrila, IEEE International Conference on Robotics and Automation (ICRA), pp. 8107-8113, 2019. doi: 10.1109/ICRA.2019.8794186
More info … Paper Code
2018
-
Context-Based Path Prediction for Targets with Switching Dynamics, J.F.P. Kooij, F. Flohr, E.A.I. Pool, D.M. Gavrila, International Journal of Computer Vision (IJCV), 2018. doi: 10.1007/s11263-018-1104-4
More info … Paper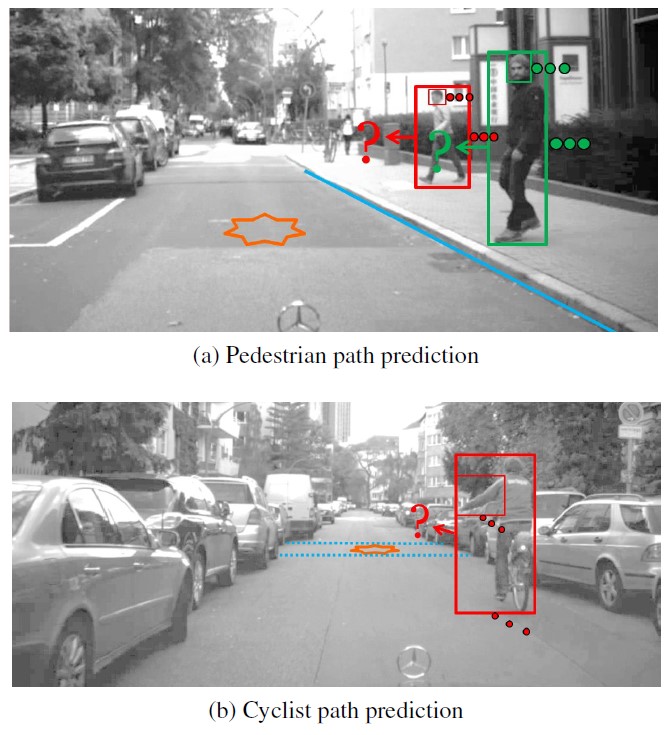
2017
-
Using road topology to improve cyclist path prediction, E.A.I. Pool, J.F.P. Kooij, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 289-296, 2017. doi: 10.1109/IVS.2017.7995734
More info … Paper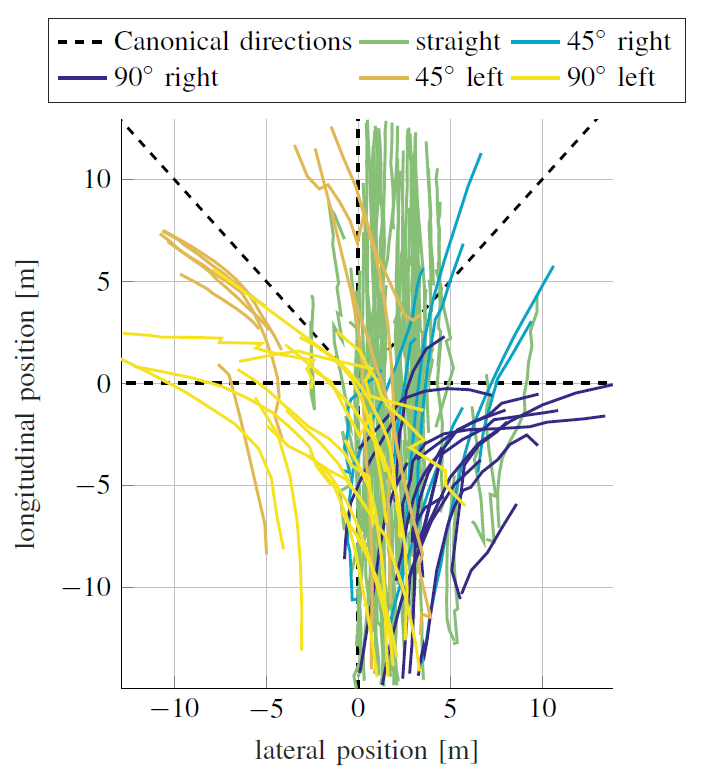
2016
-
Depth-aware motion magnification, J.F.P. Kooij, J.C. van Gemert, European Conference on Computer Vision (ECCV), pp. 467-482, 2016. doi: 10.1007/978-3-319-46484-8_28
More info … Paper Code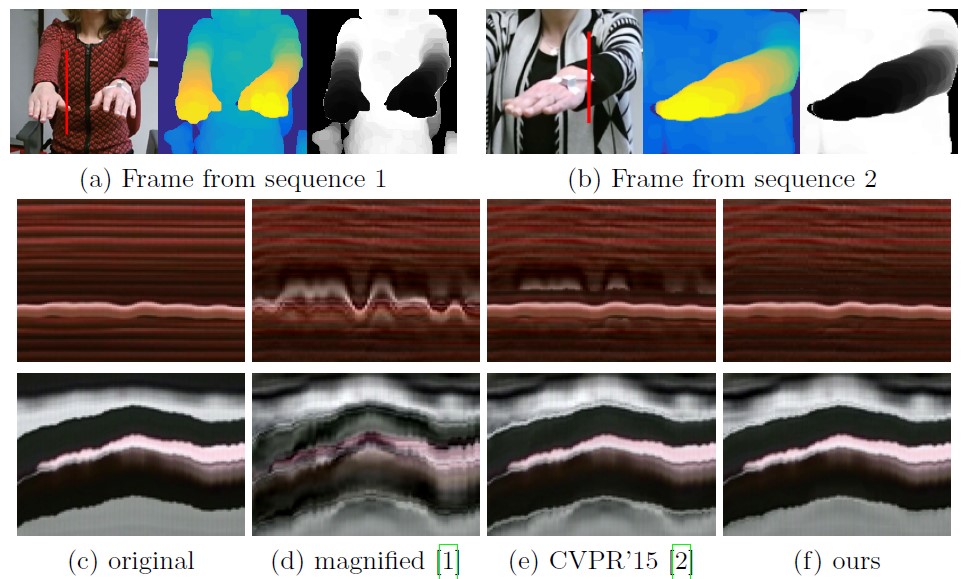
-
SenseCap: synchronized data collection with Microsoft Kinect2 and LeapMotion, J.F.P. Kooij, Proceedings of the 2016 ACM on Multimedia Conference, pp. 1218-1221, 2016. doi: 10.1145/2964284.2973805
More info … Paper Code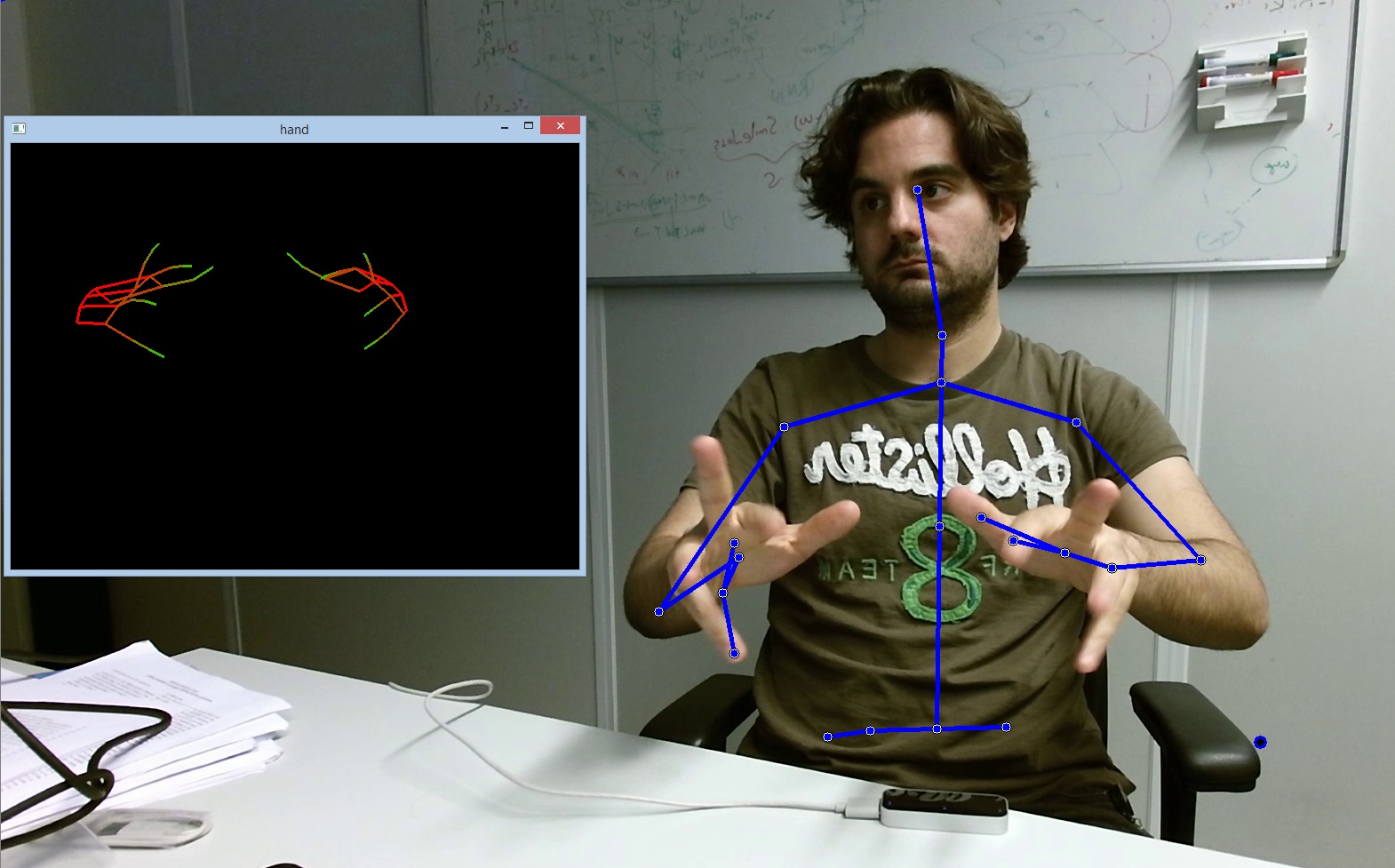
-
Multi-modal human aggression detection, J.F.P. Kooij, M.C. Liem, J.D. Krijnders, T.C. Andringa, Computer Vision and Image Understanding (CVIU), 144, pp. 106-120, 2016. doi: 10.1016/j.cviu.2015.06.009
More info … Paper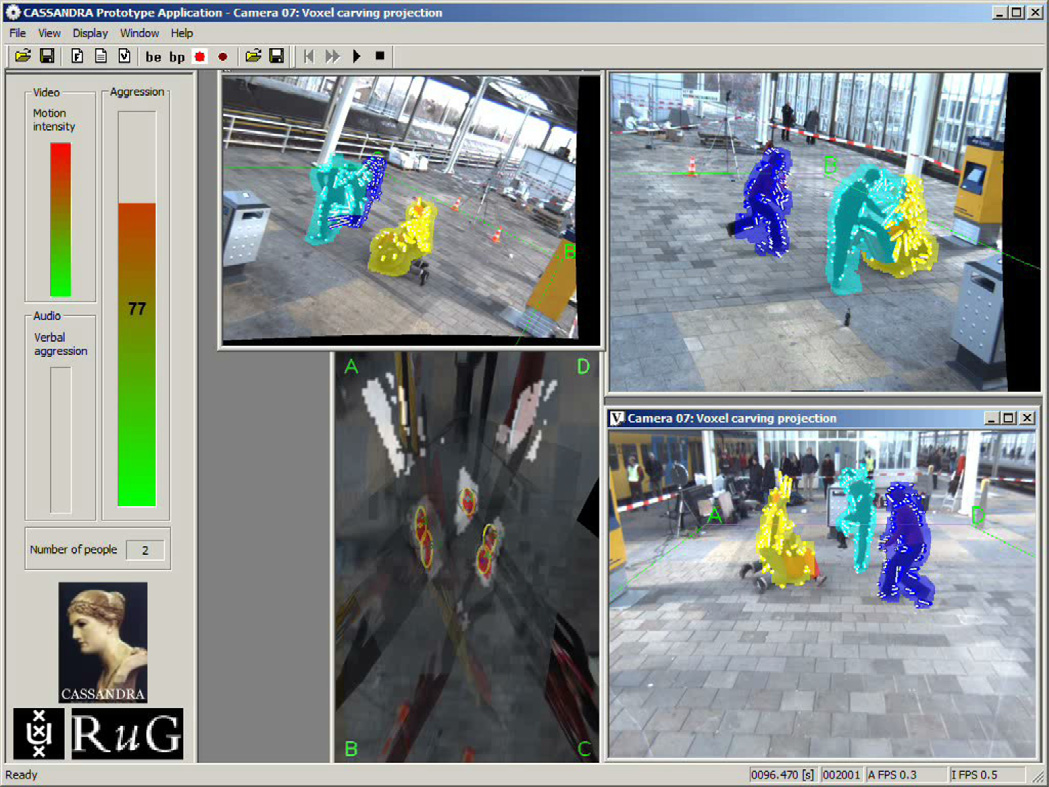
-
Mixture of switching linear dynamics to discover behavior patterns in object tracks, J.F.P. Kooij, G. Englebienne, D.M. Gavrila, IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 38(2), pp. 322-334, 2016. doi: 10.1109/TPAMI.2015.2443801
More info … Paper Code Project page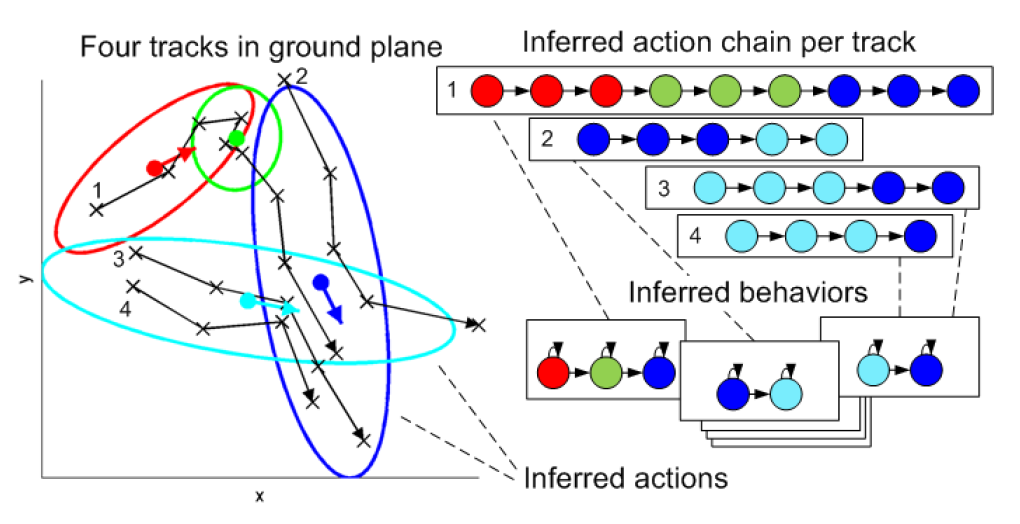
2015
-
Generative models for pedestrian track analysis, J.F.P. Kooij, PhD Thesis, University of Amsterdam, 2015.
More info … Paper
-
A probabilistic framework for joint pedestrian head and body orientation estimation, F. Flohr, M. Dumitru-Guzu, JFP Kooij, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 16(4), pp. 1872-1882, 2015. doi: 10.1109/TITS.2014.2379441
More info … Paper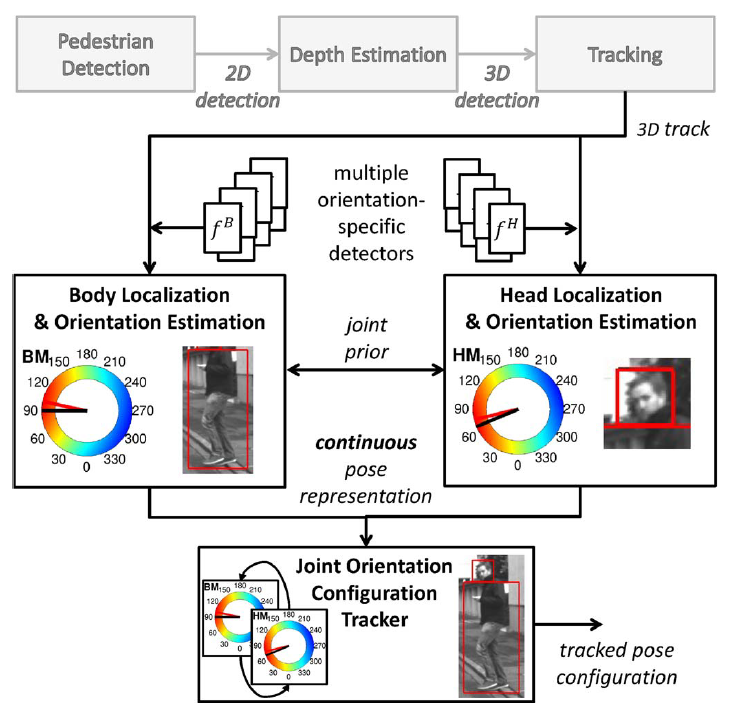
-
Identifying multiple objects from their appearance in inaccurate detections, J.F.P. Kooij, G. Englebienne, D.M. Gavrila, Computer Vision and Image Understanding (CVIU), 136, pp. 103-116, 2015. doi: 10.1016/j.cviu.2015.03.012
More info … Paper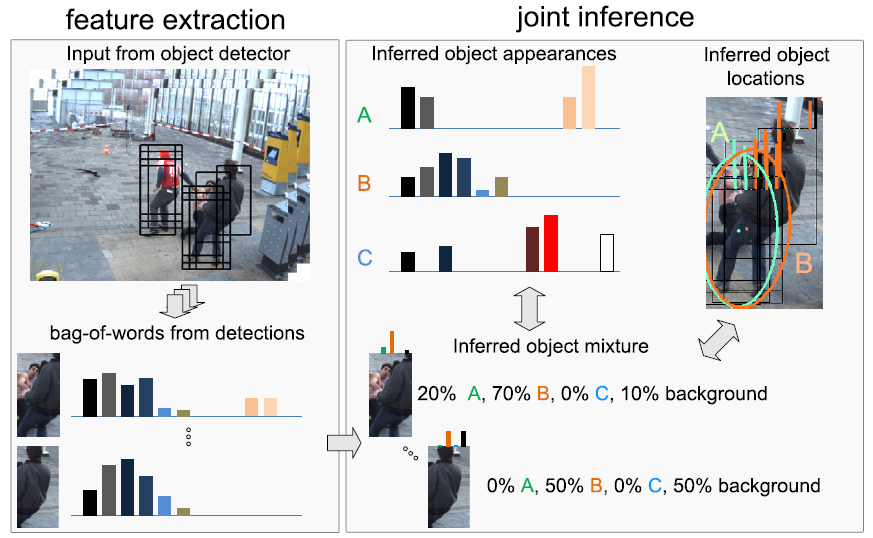
2014
-
Context-based pedestrian path prediction, J.F.P. Kooij, N. Schneider, F. Flohr, D.M. Gavrila, European Conference on Computer Vision (ECCV), pp. 618-633, 2014. doi: 10.1007/978-3-319-10599-4_40
More info … Paper Project page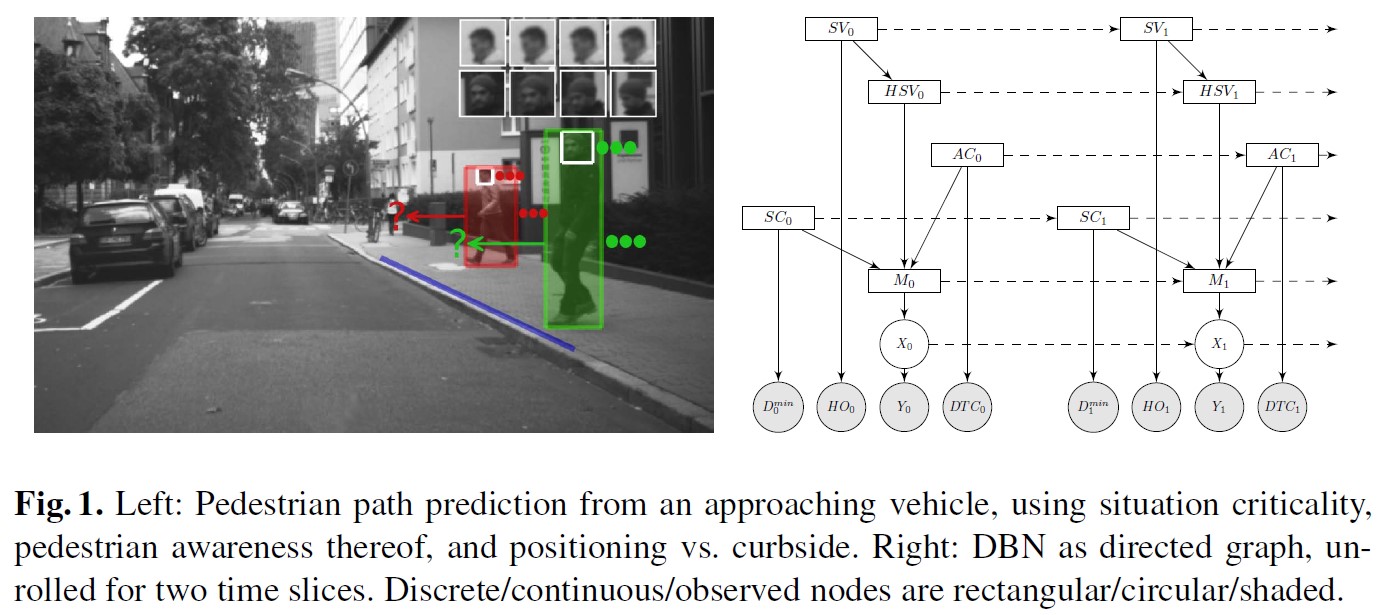
-
Joint probabilistic pedestrian head and body orientation estimation, F. Flohr, M. Dumitru-Guzu, J.F.P. Kooij, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 617-622, 2014. doi: 10.1109/IVS.2014.6856532
More info … Paper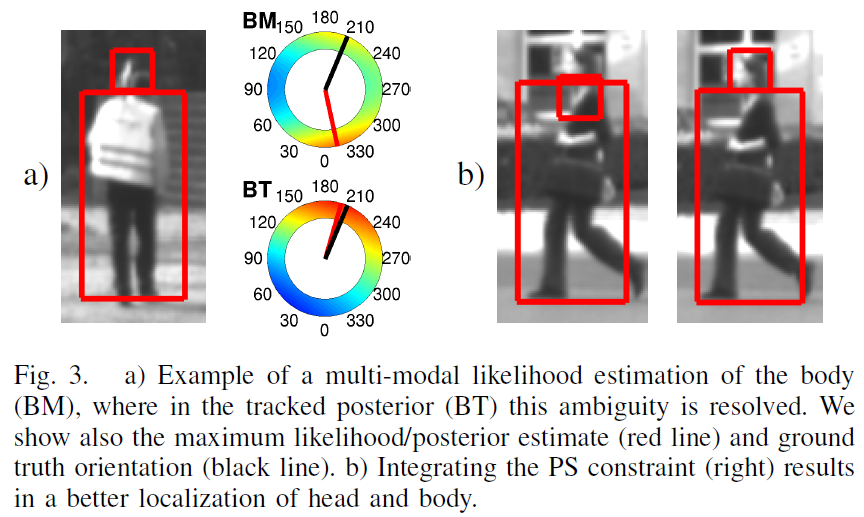
-
Analysis of pedestrian dynamics from a vehicle perspective, J.F.P. Kooij, N. Schneider, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 1445-1450, 2014. doi: 10.1109/IVS.2014.6856505
More info … Paper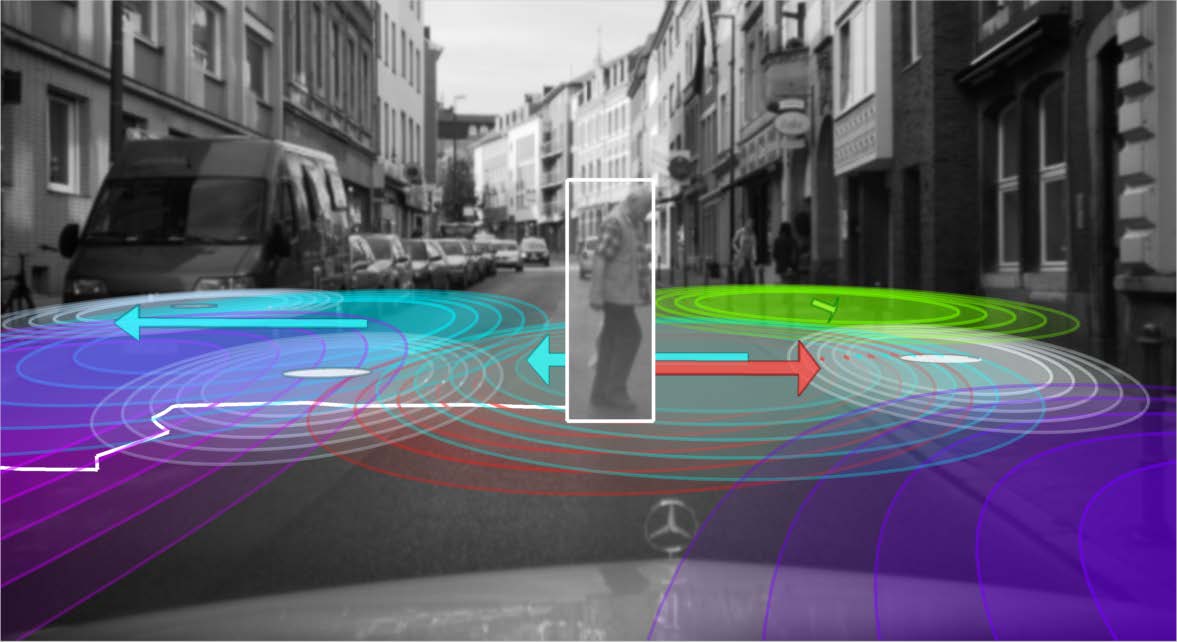
2012
-
A Non-parametric Hierarchical Model to Discover Behavior Dynamics from Tracks, J.F.P. Kooij, G. Englebienne, D.M. Gavrila, Proceedings of the European Conference on Computer Vision (ECCV), pp. 270-283, 2012. doi: 10.1007/978-3-642-33783-3_20
More info … Paper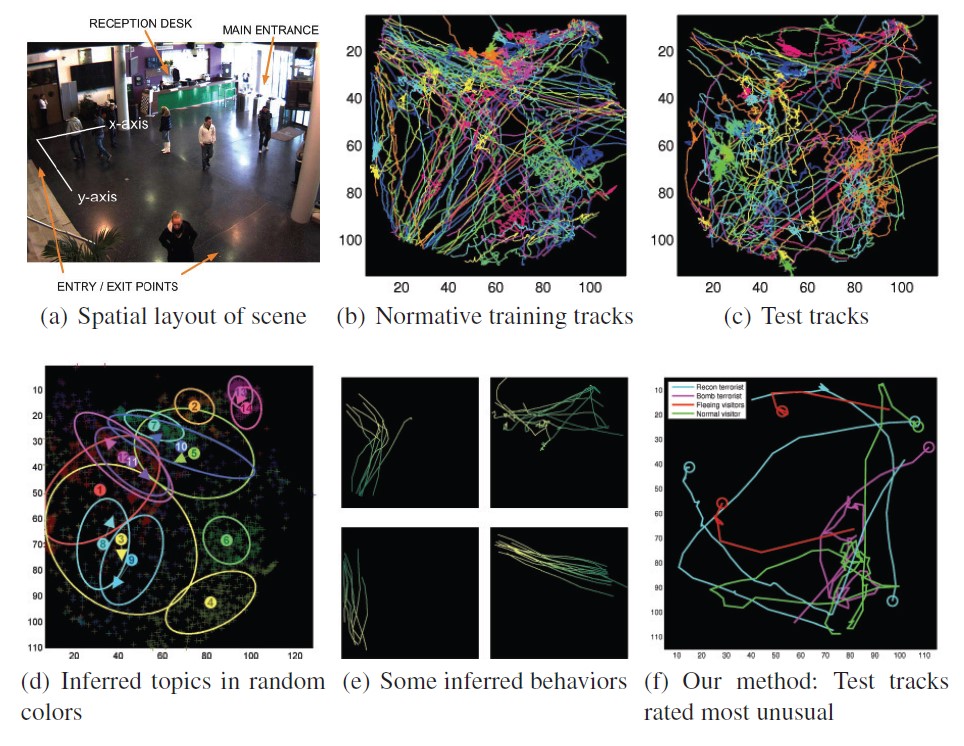
2008
-
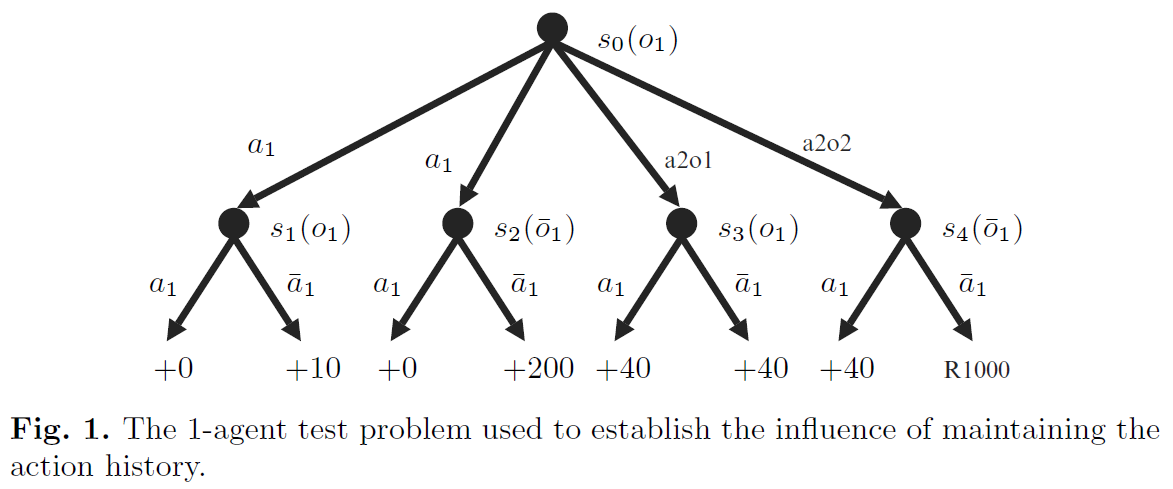
The cross-entropy method for policy search in decentralized POMDPs, F.A. Oliehoek, J.F.P. Kooij, N. Vlassis, Informatica, 32(4), pp. 341-357, 2008.
More info … Paper
-
A cross-entropy approach to solving Dec-POMDPs, F.A. Oliehoek, J.F.P. Kooij, N. Vlassis, Advances in Intelligent and Distributed Computing, pp. 145-154, 2008. doi: 10.1007/978-3-540-74930-1_15
More info … Paper