
I am an Associate Professor at the Intelligent Vehicles group, part of the Cognitive Robotics department of the Mechanical Engineering faculty, TU Delft, The Netherlands. You can find my staff page on the TU Delft website. I work on multi-modal environment perception for intelligent vehicles, and mostly target crowded urban settings.
Recent publications
Below are publications from recent years.
A more complete list can be found on the Publications page,
and on my Google Scholar profile.
Toggle screenshots
2026
-
SATree: Structure-aware tree instance segmentation from 3D LiDAR point clouds, S. Du, J. Stoter, J.F.P. Kooij, L. Nan, Urban Forestry & Urban Greening, 120, pp. 129414, 2026. doi: 10.1016/j.ufug.2026.129414
More info … Paper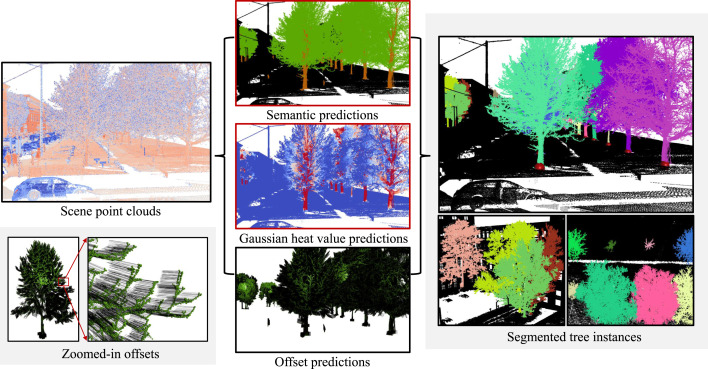
-
Uncertainty-Aware Autonomous Vehicles: Predicting the Road Ahead, S. K, Manchingal, A. Amaritei, M. Gohad, M. Sultana, J. F. P. Kooij, F. Cuzzolin, A. Bradley, IEEE International Conference on Robotics and Automation (ICRA), 2026.
More info … arXiv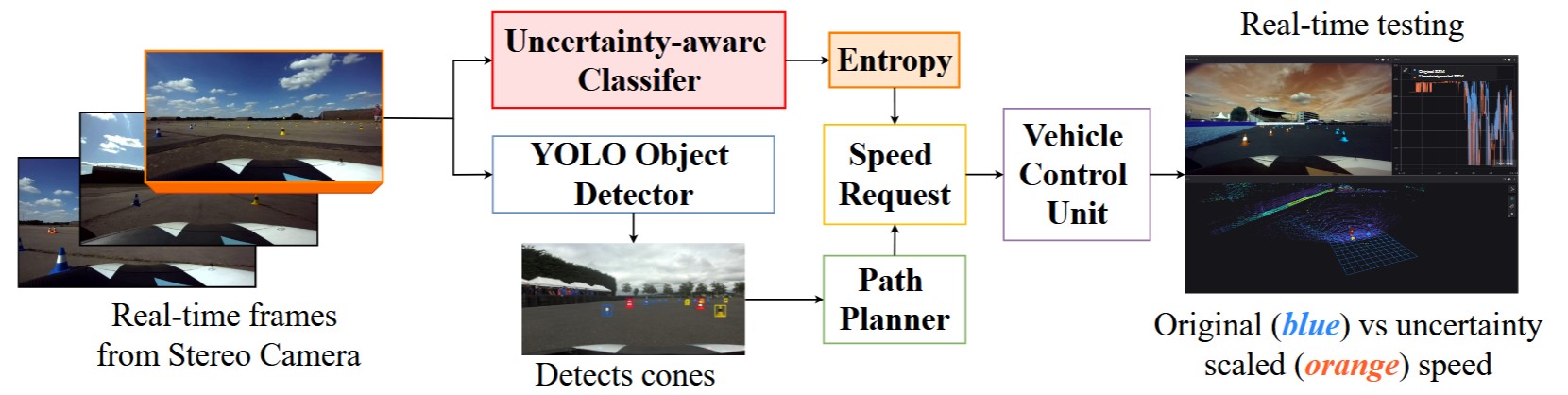
-
Off-Policy Safe Reinforcement Learning with Constrained Optimistic Exploration, G. Li, M. T. J. Spaan, J. F. P. Kooij, International Conference on Learning Representations (ICLR), 2026.
More info … arXiv Code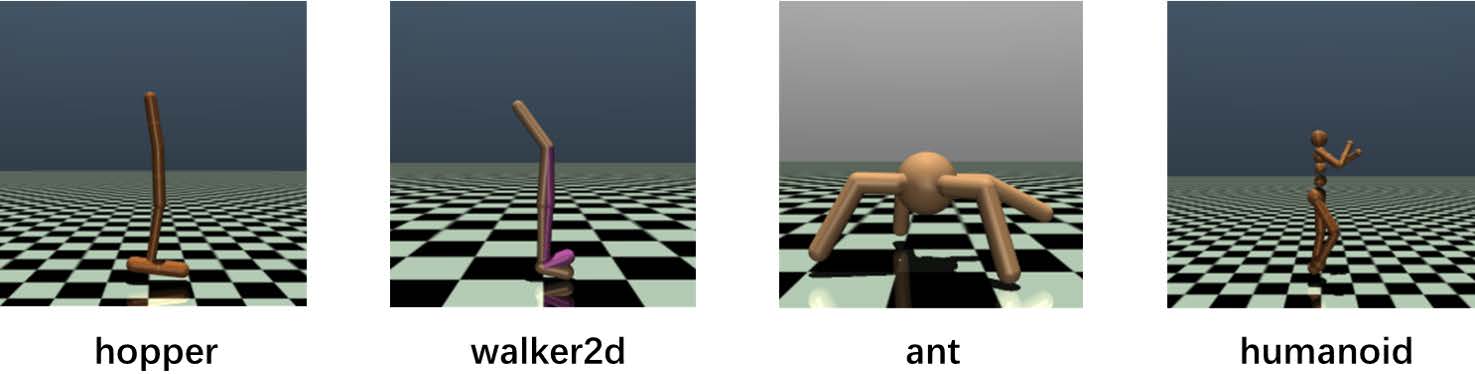
-
AsyncBEV: Cross-modal flow alignment in Asynchronous 3D Object Detection, S. Wang, H. Caesar, L. Nan, J. F. P. Kooij, International Conference on Learning Representations (ICLR), 2026. *to appear*
More info … arXiv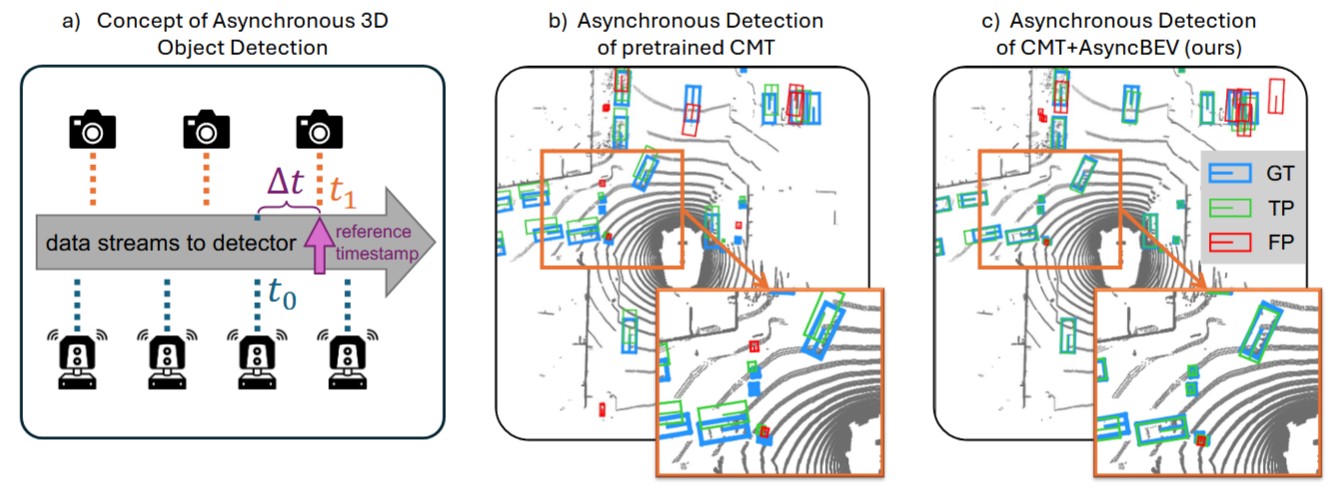
-
NeuSEditor: From Multi-View Images to Text-Guided Neural Surface Edits, N. Ibrahimli, J.F.P. Kooij, L. Nan, IEEE International Conference on 3D Vision (3DV), 2026. *to appear*
More info … arXiv Code Project page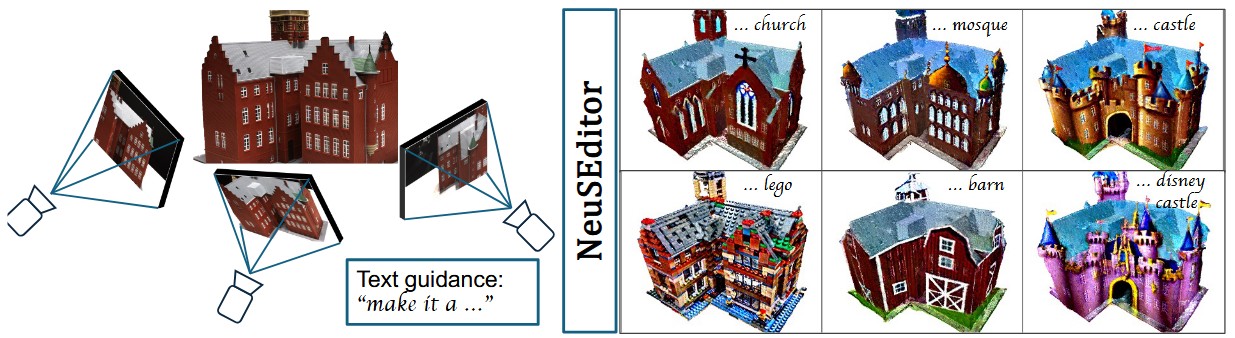
2025
-
The Overlooked Value of Test-time Reference Sets in Visual Place Recognition, M. Zaffar, L. Nan, S. Scherer, J.F.P. Kooij, Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, pp. 7234-7243, 2025.
More info … Paper arXiv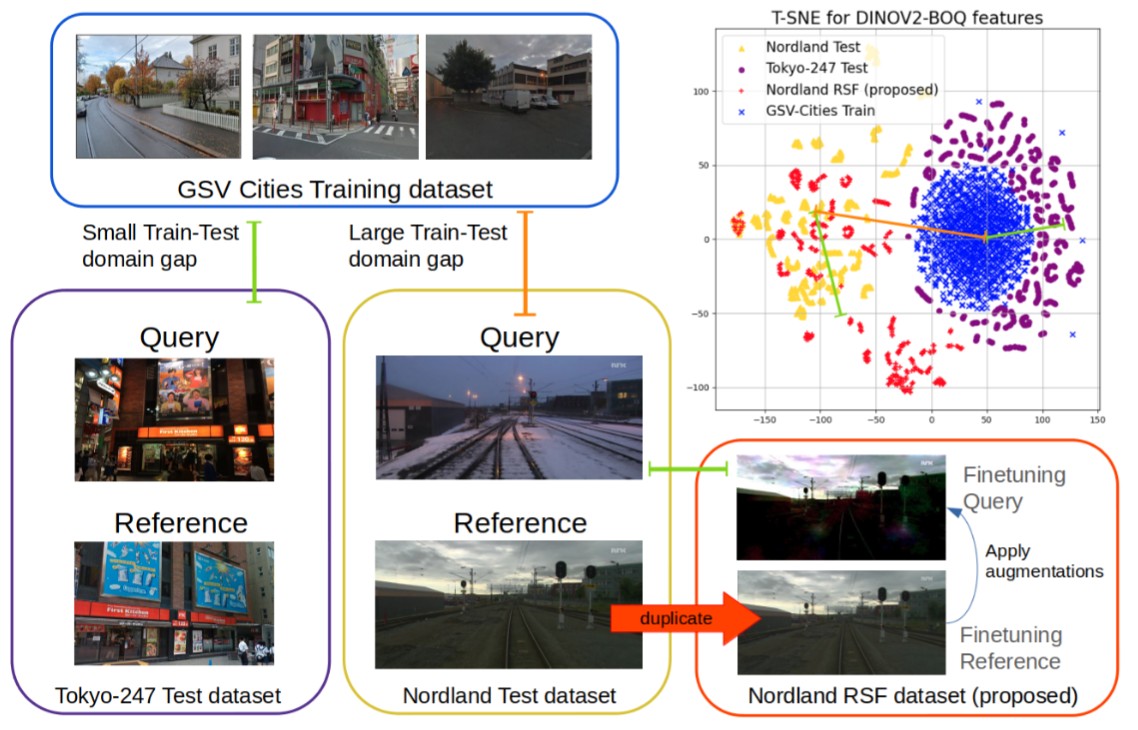
-
VoteFlow: Enforcing Local Rigidity in Self-Supervised Scene Flow, Y. Lin, S. Wang, L. Nan, J.F.P. Kooij, H. Caesar, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 17155-17164, 2025.
More info … Paper arXiv Code Video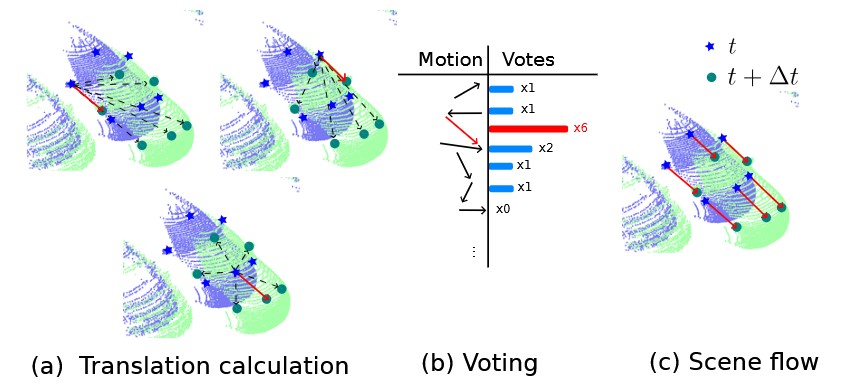
-
Road User Specific Trajectory Prediction in Mixed Traffic Using Map Data, H. Boekema, E.Y. Moustafa, J.F.P. Kooij, D.M. Gavrila, IEEE Robotics and Automation Letters (RA-L), 10(6), pp. 6159-6166, 2025. doi: 10.1109/LRA.2025.3564746
More info … Paper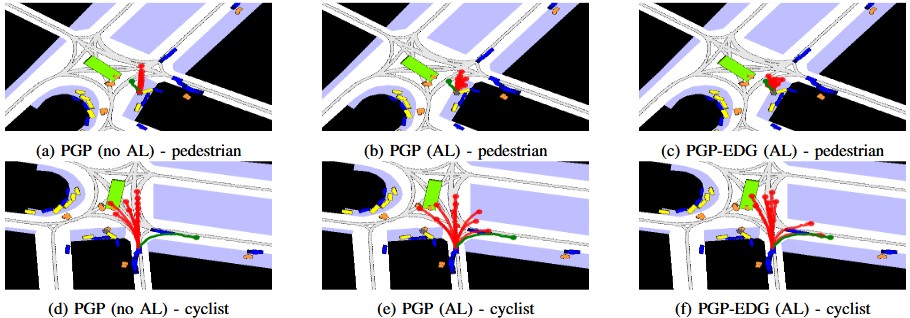
-
A Vehicle System for Navigating Among Vulnerable Road Users Including Remote Operation, O. de Groot, A. Bertipaglia, H. Boekema, V. Jain, M. Kegl, V. Kotian, T. Lentsch, Y. Lin, C. Messiou, E. Schippers, F. Tajdari, S. Wang, Z. Xia, M. Zaffar, R. Ensing, M. Garzon, J. Alonso-Mora, H. Caesar, L. Ferranti, R. Happee, J.F.P. Kooij, G. Papaioannou, B. Shyrokau, D.M. Gavrila, IEEE Intelligent Vehicles Symposium (IVS), pp. 2482-2489, 2025. doi: 10.1109/IV64158.2025.11097542
More info … Paper arXiv
List continues on my Publications page.